260 (14)
260 Podstawy nawigaqi morskiej
Wiatr działający na statek będący chwilowo w równowadze (rys. I4.3a). położy go na kącie kursowym do wiatru a < 90°. Inaczej zachowuje się statek w sytuacji pokazanej na rysunku 14.2b, gdzie kąt kursowy do wiatru będzie w iększy od 90°.
Prędkość dryfu zależy od stosunku Fp/Fw, czyli bocznej wzdłużnej powierzchni oporu wody i powietrza. Statki o małych wartościach Fp/Fw dryfują wolniej. Drugim głównym parametrem, decydującym o prędkości dryfu statku, jest prędkość wiatru. W zależności od układu położenia punktów W i P w kadłubie, statek ustawi się w stosunku do kierunku wiatru pod kątem a lub fi.
Statek ulega dryfowi w kierunku wypadkowych sil wzdłużnych i poprzecznych Fx i Fy.
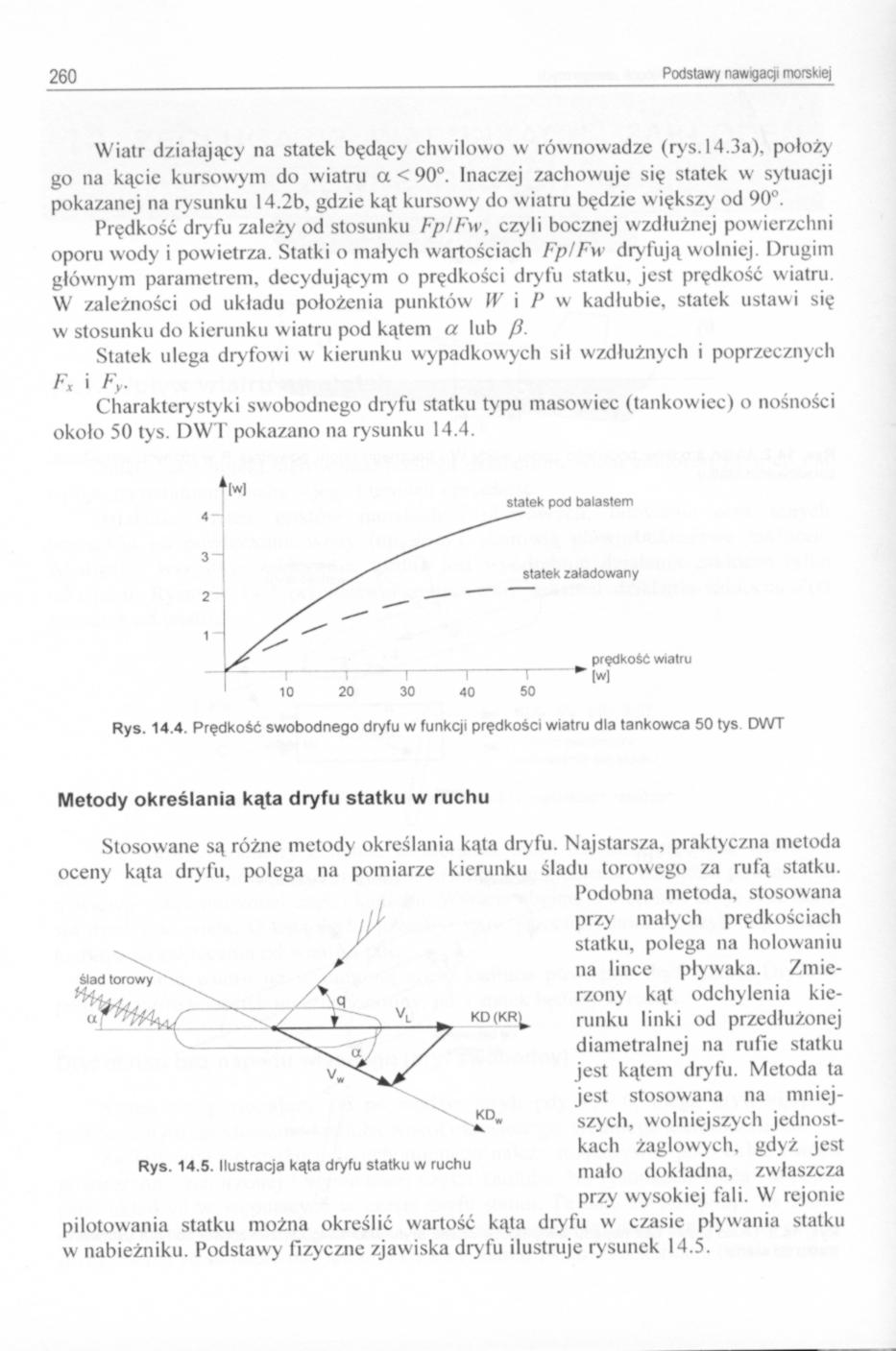
Charakterystyki swobodnego dryfu statku typu masowiec (tankowiec) o nośności około 50 tys. DWT pokazano na rysunku 14.4.
statek pod balastem
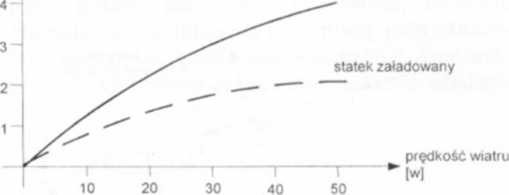
Rys. 14.4 Prędkość swobodnego dryfu w funkcji prędkości wiatru dla tankowca 50 tys DWT
Metody określania kąta dryfu statku w ruchu
Stosowane są różne metody określania kąta dryfu. Najstarsza, praktyczna metoda oceny kąta dryfu, polega na pomiarze kierunku śladu torowego za rufą statku.
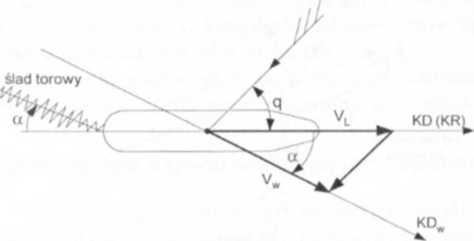
Rys. 14.5. Ilustracja kąta dryfu statku w ruchu
Podobna metoda, stosowana przy małych prędkościach statku, polega na holowaniu na lince pływaka. Zmierzony kąt odchylenia kierunku linki od przedłużonej diametralnej na rufie statku jest kątem dryfu. Metoda ta jest stosowana na mniejszych. wolniejszych jednostkach żaglowych, gdyż jest mało dokładna, zwłaszcza przy wysokiej fali. W rejonie pilotowania statku można określić wartość kąta dryfu w czasie pływania statku w nabieżniku. Podstawy fizyczne zjawiska dryfu ilustruje rysunek 14.5.
Wyszukiwarka
Podobne podstrony:
322 (14) 322 Podstawy nawigacji morskiej ZMIENNE STEROWANIA (WEJŚCIE) STATEK • sterowanie statkiem -
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
324 (14) 324 Podstawy nawigacji morskiej 6. W planie podróży powinny znaleźć się p
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
262 (14) 262 Podstawy nawigacji morskiej Wartość dryfu określa algebraiczna różnica między KDw i KR:
264 (14) 264 Podstawy nawigaqi morskiej W praktyce nawigacyjnej każdy nawigator powinien korzystać z
292 (14) 292 Podstawy nawgaqi morskiej Metoda polega na wyznaczeniu na mapie obiektów dobrze odbijaj
344 (12) 344 Podstawy nawigacji morskiei • Branie wody na pokład i slamming powodu
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
370 (10) 370 Podstawy nawigaqi morskie] Bliższa analiza zadań od I do 5 sprecyzuje plan działania ob
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
278 (14) 278 Podstawy naw«jaqi morskie] Jednak w porównaniu z mapami elektronicznymi wymaga dużych n
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
więcej podobnych podstron