322 (14)
322 Podstawy nawigacji morskiej
ZMIENNE
STEROWANIA
(WEJŚCIE)
STATEK • sterowanie statkiem
- mostek, ster. SG,
- reakcja SG na sterowanie
- dzielność morska,
- wyposażenie statku
ZMIENNE STANU STATKU
• pozycja wejściowa (<p, X),
- prędkość Vs i składowe,
• kąt drogi KD
ODPOWIEDŹ ‘ ' KADŁUBA NA DZIAŁANIE ŚRODOWISKA
ŚRODOWISKO OCEANICZNE
* fizyczne przeszkody.
• stan pogody.
- falowanie, wiatr.
- prądy pływowe, stale.
* widoczność.
• zlodzeme. ruch lodów
22
|
NAWIGATOR | ||
|
• doświadczenie i wyszkolenie | ||
|
• organizacja pracy - ergonomia pracy. - kwalifikacje, - zdolność podejmowania decyzji |
wyjście | |
|
wektor ruchu | ||
21
ZMIENNE STEROWANIE STATKIEM
a. kąt wychylenia steru N obroty SG nastawy śruby
ŹRÓDŁA INFORMACJI O ŚRODOWISKU
- publikacje nawig mapy, locje.
• stacje nadające prognozy pogody
• przepisy.
- inne informacje (telef ).
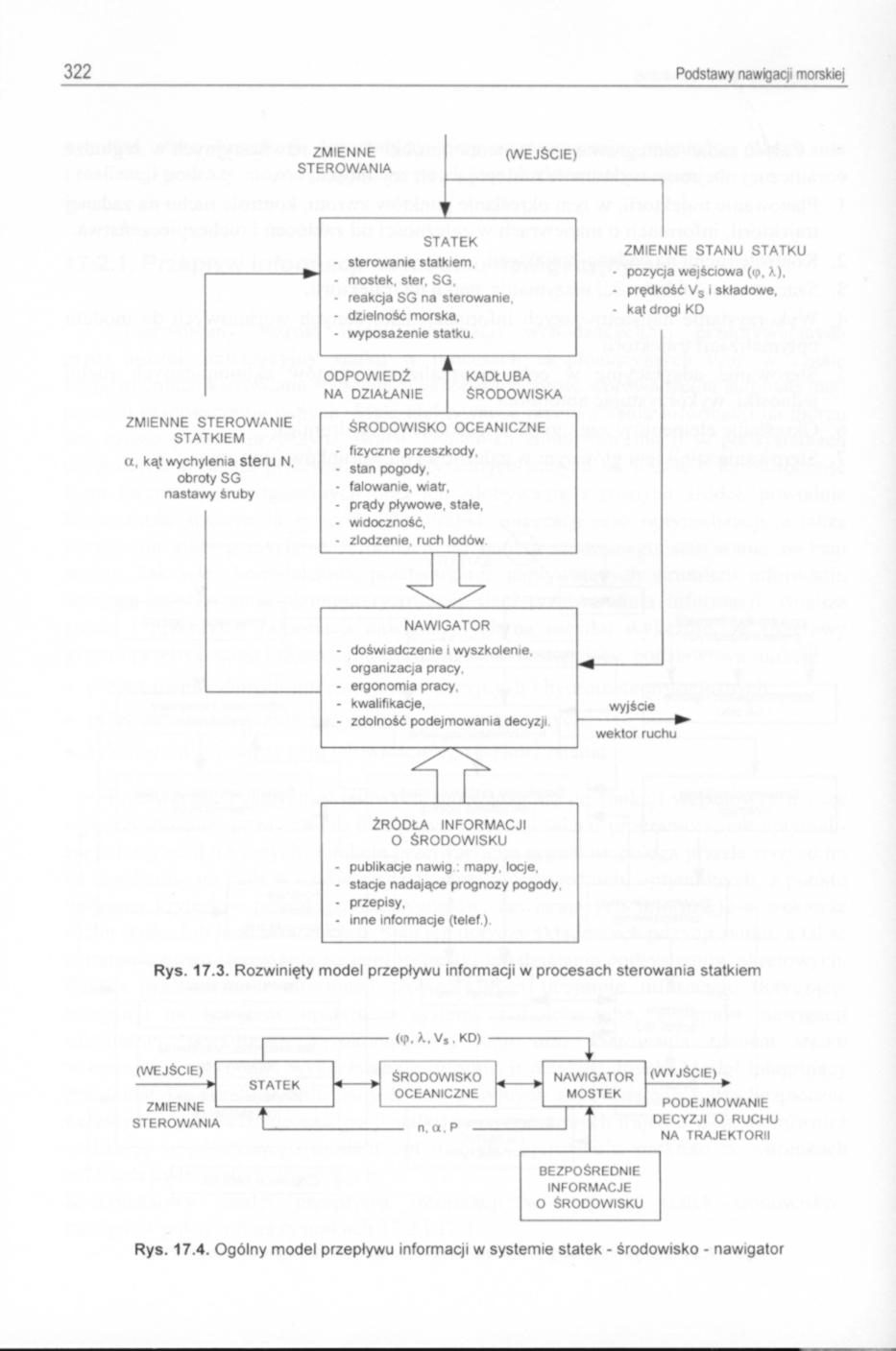
Rys. 17.3. Rozwinięty model przepływu informacji w procesach sterowania statkiem
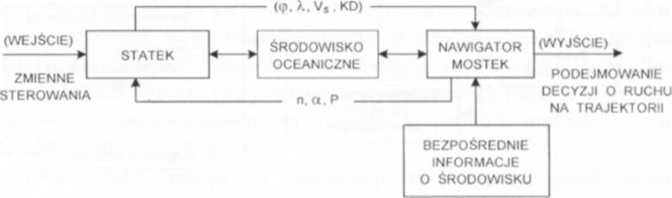
Rys. 17.4. Ogólny model przepływu informacji w systemie statek - środowisko - nawigator
Wyszukiwarka
Podobne podstrony:
260 (14) 260 Podstawy nawigaqi morskiej Wiatr działający na statek będący chwilowo w równowadze (rys
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
324 (14) 324 Podstawy nawigacji morskiej 6. W planie podróży powinny znaleźć się p
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
262 (14) 262 Podstawy nawigacji morskiej Wartość dryfu określa algebraiczna różnica między KDw i KR:
264 (14) 264 Podstawy nawigaqi morskiej W praktyce nawigacyjnej każdy nawigator powinien korzystać z
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
278 (14) 278 Podstawy naw«jaqi morskie] Jednak w porównaniu z mapami elektronicznymi wymaga dużych n
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
więcej podobnych podstron