262 (14)
262 Podstawy nawigacji morskiej
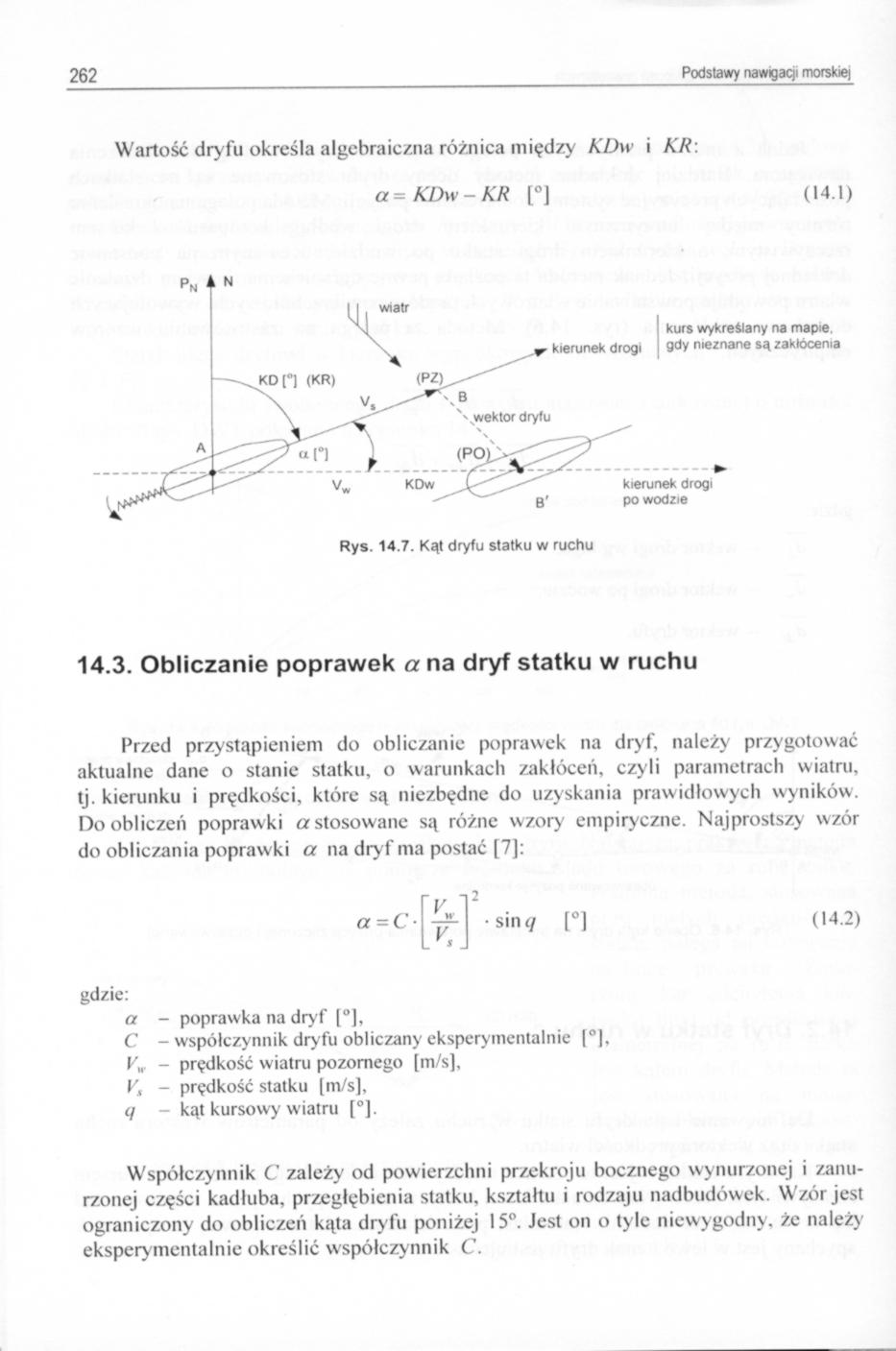
Wartość dryfu określa algebraiczna różnica między KDw i KR:
a = KDw - KR [°]
Pn ♦ N
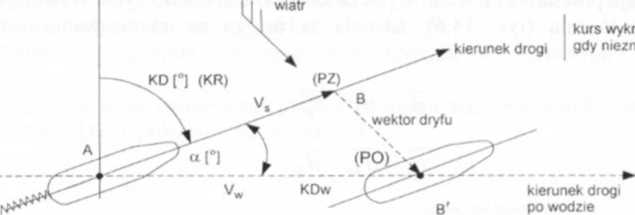
Rys. 14.7. Kąt dryfu statku w ruchu
I kurs wykreślany na mapie, kierunek drogi 9dy nieznane są zakłócenia
14.3. Obliczanie poprawek a na dryf statku w ruchu
Przed przystąpieniem do obliczanie poprawek na dryf, należy przygotować aktualne dane o stanie statku, o warunkach zakłóceń, czyli parametrach wiatru, tj. kierunku i prędkości, które są niezbędne do uzyskania prawidłowych wyników. Do obliczeń poprawki a stosowane są różne wzory empiryczne. Najprostszy wzór do obliczania poprawki a na dryf ma postać [7]:

(I4.2)
gdzie:
a - poprawka na dryf ["],
C - współczynnik dryfu obliczany eksperymentalnie [°],
F„ - prędkość wiatru pozornego [m/s],
V- prędkość statku [m/s],
</ - kąt kursowy wiatru [°].
Współczynnik C zależy od powierzchni przekroju bocznego wynurzonej i zanurzonej części kadłuba, przegłębienia statku, kształtu i rodzaju nadbudówek. Wzór jest ograniczony do obliczeń kąta dryfu poniżej I5°. Jest on o tyle niewygodny, że należy eksperymentalnie określić współczynnik C.
Wyszukiwarka
Podobne podstrony:
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
322 (14) 322 Podstawy nawigacji morskiej ZMIENNE STEROWANIA (WEJŚCIE) STATEK • sterowanie statkiem -
324 (14) 324 Podstawy nawigacji morskiej 6. W planie podróży powinny znaleźć się p
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
240 (18) 240 Podstawy nawigacji morskiej Wartość wektora r zejścia statku z osi toru zależy od dwóch
260 (14) 260 Podstawy nawigaqi morskiej Wiatr działający na statek będący chwilowo w równowadze (rys
264 (14) 264 Podstawy nawigaqi morskiej W praktyce nawigacyjnej każdy nawigator powinien korzystać z
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
278 (14) 278 Podstawy naw«jaqi morskie] Jednak w porównaniu z mapami elektronicznymi wymaga dużych n
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
więcej podobnych podstron