288 (13)
288 Podstawy nawigacji morskie)
Błąd wektorowy odległości wynosi:
0=0.01 -Z [m] (15.2)
gdzie:
Z zakres pracy radaru [m].
Kąty przecięcia się linii pozycyjnych dobrano dla jednakowych wartości, podobnie jak równe odległości do mierzonych obiektów.
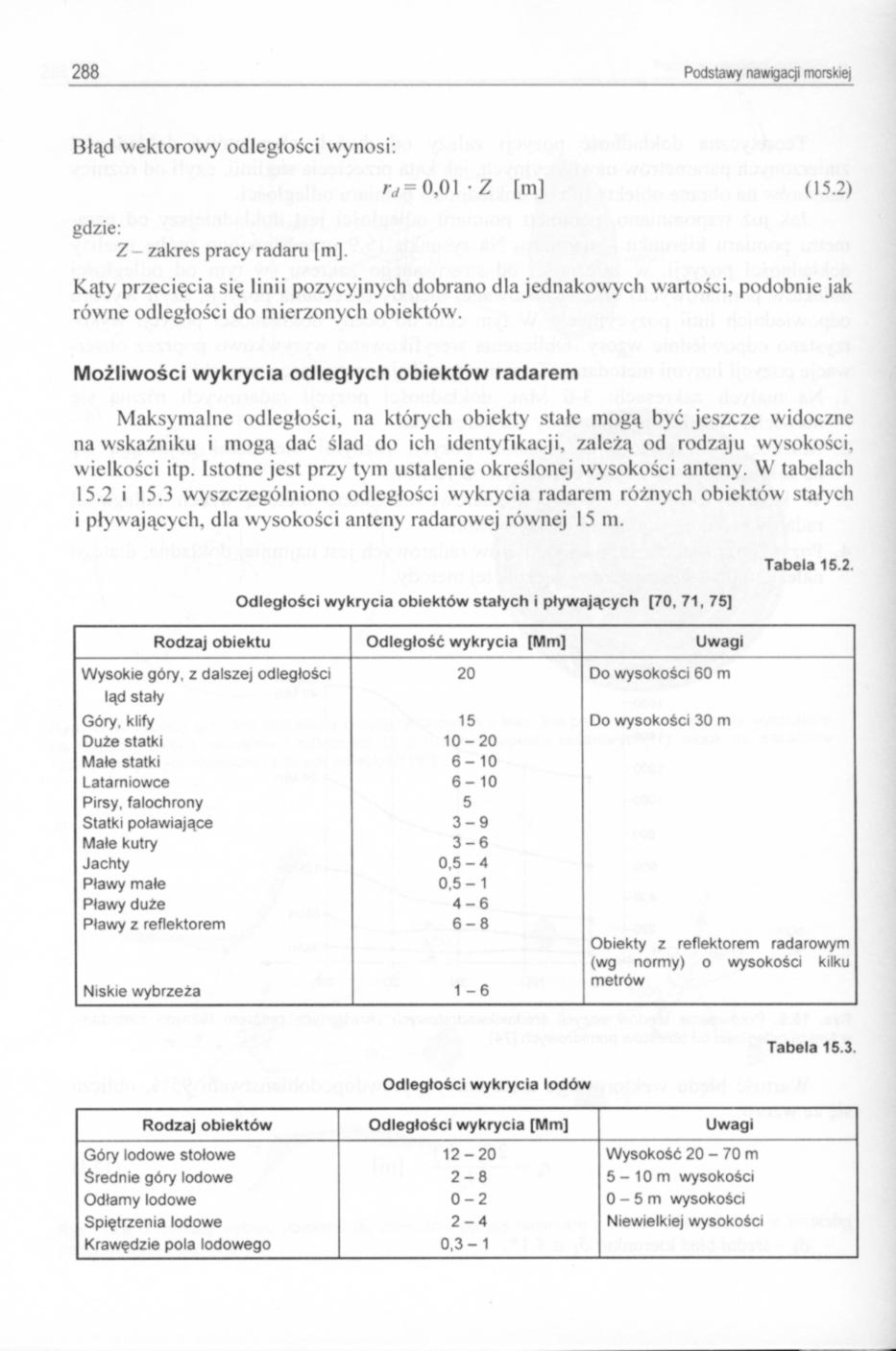
Możliwości wykrycia odległych obiektów radarem
Maksymalne odległości, na których obiekty stałe mogą być jeszcze widoczne na wskaźniku i mogą dać ślad do ich identyfikacji, zależą od rodzaju wysokości, w ielkości itp. Istotne jest przy tym ustalenie określonej wysokości anteny. W tabelach 15.2 i 15.3 wyszczególniono odległości wykrycia radarem różnych obiektów stałych i pływających, dla wysokości anteny radarowej równej 15 m.
Tabela 15.2.
Odległości wykrycia obiektów stałych i pływających [70, 71, 75]
|
Rodzaj obiektu |
Odległość wykrycia [Mm] |
Uwagi |
|
Wysokie góry, z dalszej odległości ląd stały |
20 |
Do wysokości 60 m |
|
Góry, klify |
15 |
Do wysokości 30 m |
|
Duże statki |
10-20 | |
|
Małe statki |
6-10 | |
|
Latarniowce |
6-10 | |
|
Pirsy, falochrony |
5 | |
|
Statki poławiające |
3-9 | |
|
Małe kutry |
3-6 | |
|
Jachty |
0,5-4 | |
|
Pławy małe |
0,5-1 | |
|
Pławy duże |
4-6 | |
|
Pławy z reflektorem |
6-8 |
Obiekty z reflektorem radarowym (wg normy) o wysokości kilku metrów |
|
Niskie wybrzeża |
1-6 |
Tabela 15.3.
Odległości wykrycia lodów
|
Rodzaj obiektów |
Odległości wykrycia [Mm] |
Uwagi |
|
Góry lodowe stołowe |
12-20 |
Wysokość 20 - 70 m |
|
Średnie góry lodowe |
2-8 |
5 - 10 m wysokości |
|
Odłamy lodowe |
0-2 |
0 - 5 m wysokości |
|
Spiętrzenia lodowe |
2-4 |
Niewielkiej wysokości |
|
Krawędzie pola lodowego |
0,3-1 |
Wyszukiwarka
Podobne podstrony:
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
320 (13) 320 Podstawy nawigacji morskiej z metod stosowanych w automatyce, przy rozpatrywaniu proces
336 (13) 336 Podstawy nawigaqi morskiej Wiele instytutów badawczych na świecie od lal zajmuje się pr
338 (13) 338 Podstawy nawigacji morskiej 3. Minimalizacja uszkodzeń sztormowych ła
352 (13) 352 Podstawy nawigaqi morskiej 9. Przeanalizowanie informacji klimatyczny
240 (18) 240 Podstawy nawigacji morskiej Wartość wektora r zejścia statku z osi toru zależy od dwóch
248 (19) 248 Podstawy nawigacji morskiej13.7. Pozycja z dwóch odległości na jeden obiekt Jeżeli nie
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
422 (7) 422 Podstawy nawigacji morskiej19.13. Prognozy prądów według Admiralty Tide Tables (ATT) W t
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
246 (18) 246 Podstawy nawigacji morskiej ___ KDd Rys. 13.11. Granice niebezpieczeństwa wyznaczone
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
więcej podobnych podstron