276 (14)
276 Podstawy nawigacji morskiej
• czas przejścia t,
• szerokość przejścia b,
• margines bezpieczeństwa Ay.
Ponadto, poza wymaganymi systemami nawigacyjnymi (GPS, DGPS, radar, namiary i odległości), należy uwzględnić:
• wymagania nawigacyjne, jak: zapas wody pod stępką, prędkość bezpieczną, moment wysokiej wody, prądy pływowe, prądy stałe itp.;
• obszary zmiany map;
• obiekty widoczne dla radaru oraz charakterystykę świateł;
• wykreślenie linii równoległych PI na wskaźniku radarowym, jako marginesu bezpiecznych odległości;
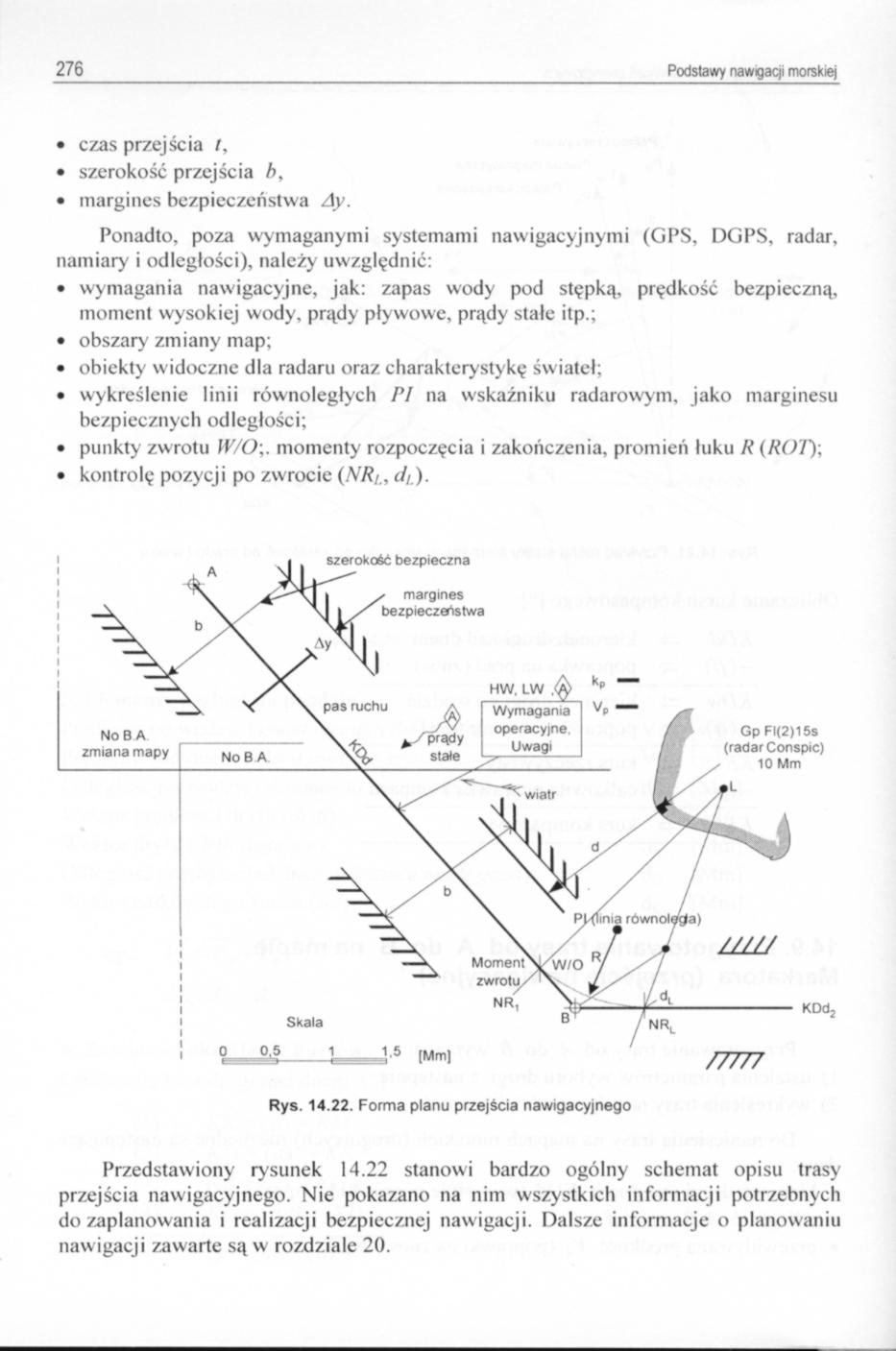
• punkty zwrotu W/0\. momenty rozpoczęcia i zakończenia, promień łuku R (ROT);
• kontrolę pozycji po zwrocie (AT?/., di).
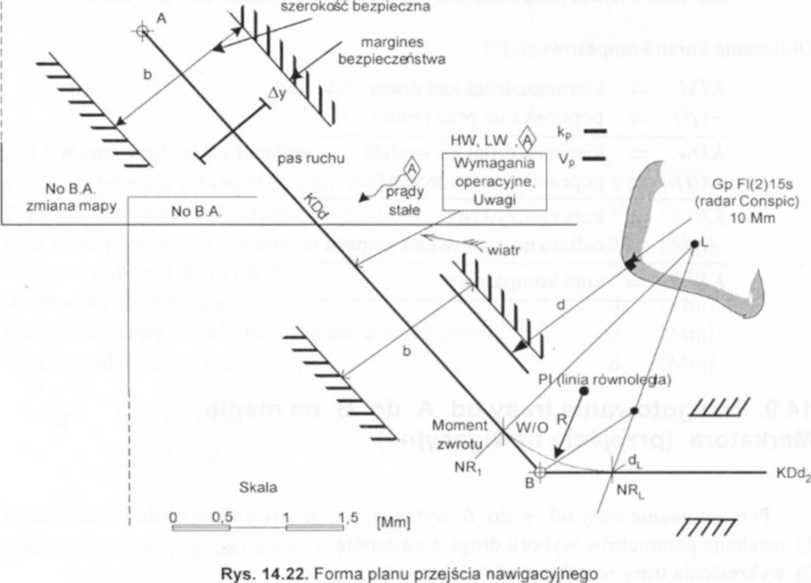
Przedstawiony rysunek 14.22 stanowi bardzo ogólny schemat opisu trasy przejścia nawigacyjnego. Nie pokazano na nim wszystkich informacji potrzebnych do zaplanowania i realizacji bezpiecznej nawigacji. Dalsze informacje o planowaniu nawigacji zawarte są w rozdziale 20.
Wyszukiwarka
Podobne podstrony:
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
322 (14) 322 Podstawy nawigacji morskiej ZMIENNE STEROWANIA (WEJŚCIE) STATEK • sterowanie statkiem -
324 (14) 324 Podstawy nawigacji morskiej 6. W planie podróży powinny znaleźć się p
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
408 (6) 408 Podstawy nawigacji morskie) Czas portowy (Heigh Waler al the Fuli and (. hangę HWF&C
260 (14) 260 Podstawy nawigaqi morskiej Wiatr działający na statek będący chwilowo w równowadze (rys
262 (14) 262 Podstawy nawigacji morskiej Wartość dryfu określa algebraiczna różnica między KDw i KR:
264 (14) 264 Podstawy nawigaqi morskiej W praktyce nawigacyjnej każdy nawigator powinien korzystać z
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
278 (14) 278 Podstawy naw«jaqi morskie] Jednak w porównaniu z mapami elektronicznymi wymaga dużych n
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
więcej podobnych podstron