264 (14)
264 Podstawy nawigaqi morskiej
W praktyce nawigacyjnej każdy nawigator powinien korzystać z przygotowanego wykresu poprawek na wiatr dla niskich wartości prędkości statku, w celu szybkiego określenia poprawki na dryf w rejonach nawigacyjnie trudnych.
Przykład:
Określić u (“] dla q = 045, V„ = 8 w, dla \ż = 6w(const)
Odpowiedź: a i 7' określono na podstawie wykresu z rys 14 9
14.4. Nawigacja na prądzie
W żegludze przybrzeżnej i w pilotażu statek często manewruje w ograniczonym obszarze wodnym, gdzie występują silne prądy. Niezależnie od rodzaju prądu (Pl ywowego lub stałego), istnieje konieczność opracowania zasad określenia kierunku drogi nad dnem oraz prędkości (KDd. Vj).
Zakłada się następujące warianty: I - gdy statek jest bierny w stosunku do parametrów prądu działającego na kadłub oraz 2 - gdy jest czas na ocenę nieznanych parametrów. Jeżeli są znane parametry prądu, to stosuje się wariant czynnego pływania na prądzie, czyli przeciwdziałania prądowi. Zakłada się przy tym. że na statek nie działa wiatr.
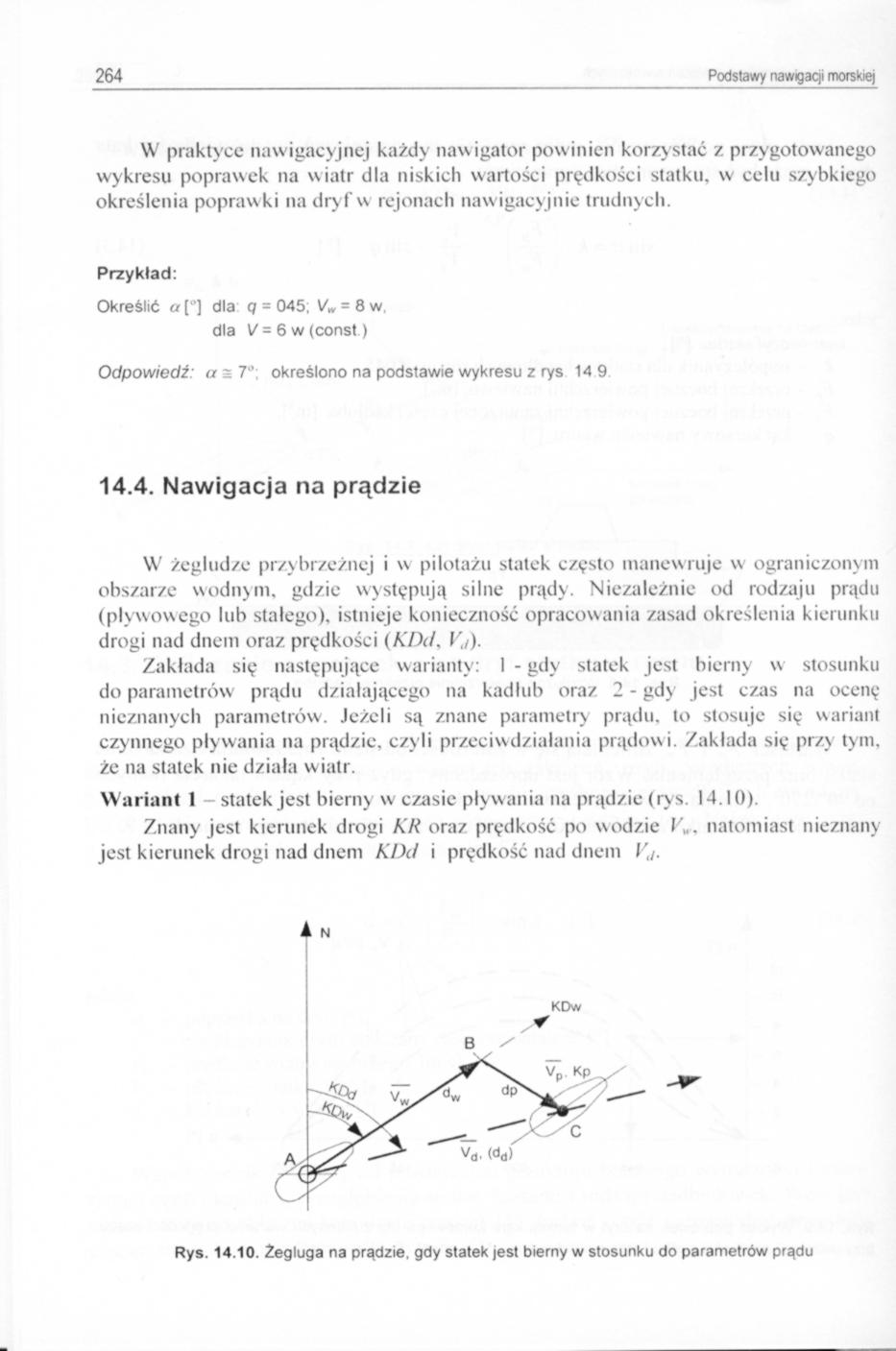
Wariant 1 - statek jest bierny w czasie pływania na prądzie (rys. 14.10).
Znany jest kierunek drogi KR oraz prędkość po wodzie Vw. natomiast nieznany jest kierunek drogi nad dnem KDd i prędkość nad dnem i',/.
A N
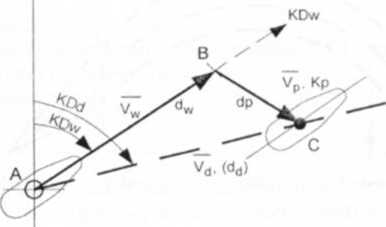
Rys. 14.10. Żegluga na prądzie, gdy statek jest bierny w stosunku do parametrów prądu
Wyszukiwarka
Podobne podstrony:
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
322 (14) 322 Podstawy nawigacji morskiej ZMIENNE STEROWANIA (WEJŚCIE) STATEK • sterowanie statkiem -
324 (14) 324 Podstawy nawigacji morskiej 6. W planie podróży powinny znaleźć się p
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
260 (14) 260 Podstawy nawigaqi morskiej Wiatr działający na statek będący chwilowo w równowadze (rys
262 (14) 262 Podstawy nawigacji morskiej Wartość dryfu określa algebraiczna różnica między KDw i KR:
278 (14) 278 Podstawy naw«jaqi morskie] Jednak w porównaniu z mapami elektronicznymi wymaga dużych n
292 (14) 292 Podstawy nawgaqi morskiej Metoda polega na wyznaczeniu na mapie obiektów dobrze odbijaj
1) praktyka zorganizowana przez Wydział - student korzysta z przygotowanej
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
więcej podobnych podstron