252 (15)
252 Podstawy nawigaqi morskiej
Dobre wyniki dokładności pozycji można uzyskać, gdy trzy obiekty do namierzania leżą na jednej linii lub prawie na jednej linii (rys. 13.18e i d).
Jeżeli układ obiektów znajduje się w głębi lądu, przy wartościach a\ i a-> mniejszych od 30°, to pozycja będzie mało dokładna (rys. 13.18c).
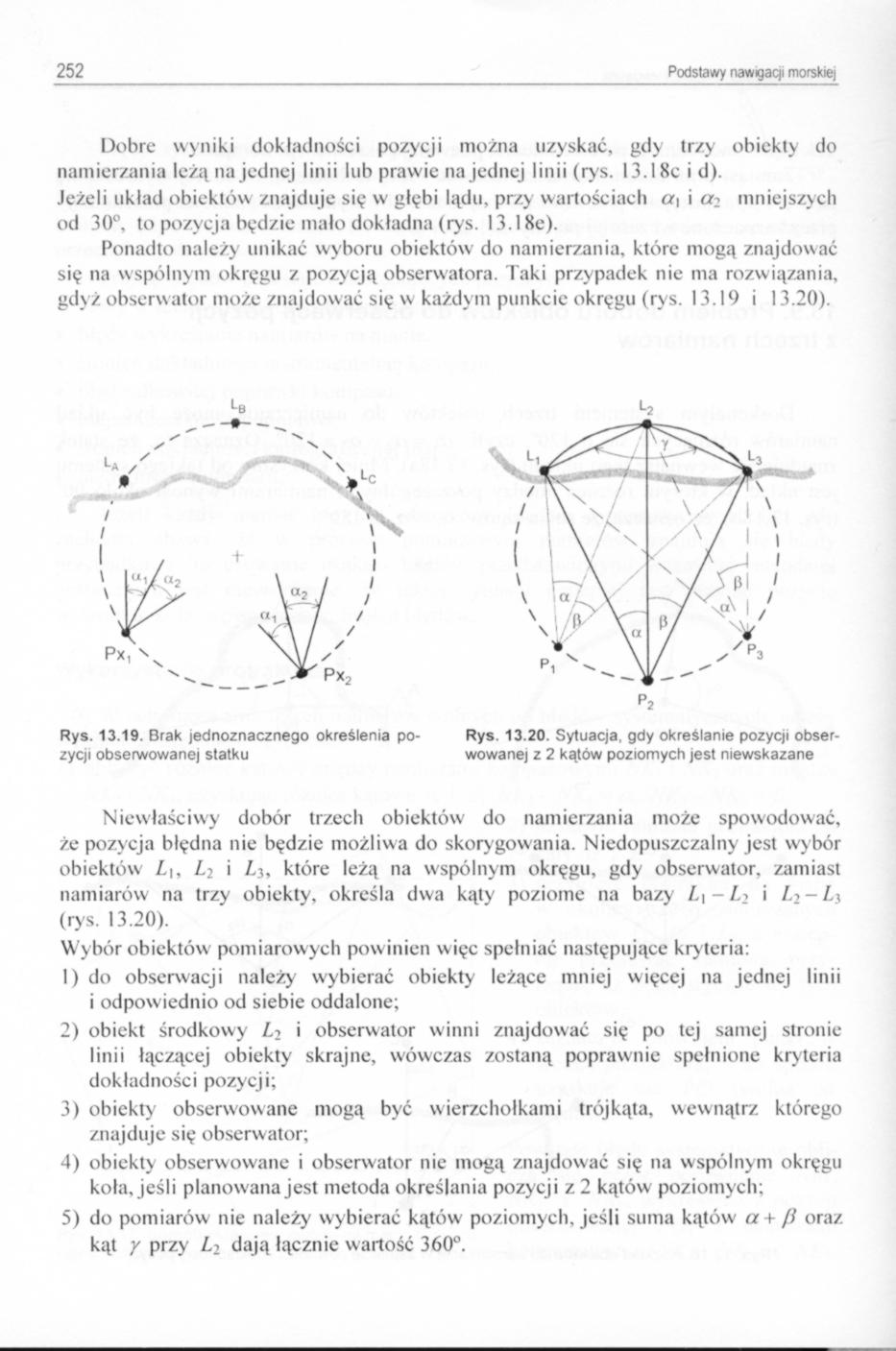
Ponadto należy unikać wyboru obiektów do namierzania, które mogą znajdować się na wspólnym okręgu z pozycją obserwatora. Taki przypadek nie ma rozwiązania, gdyż obserwator może znajdować się w każdym punkcie okręgu (rys. 13.19 i 13.20).
Rys. 13.19. Brak jednoznacznego określenia pozycji obserwowanej statku
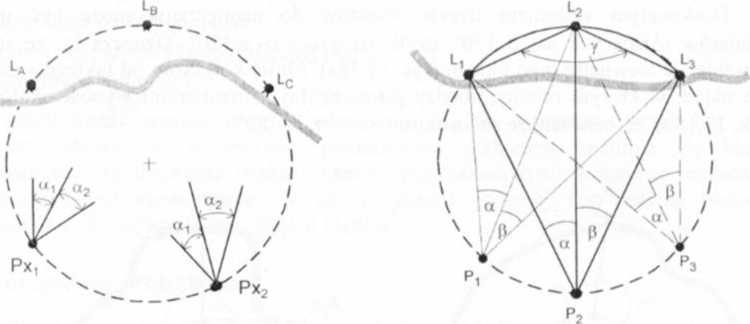
Rys. 13.20. Sytuacja, gdy określanie pozycji obserwowanej z 2 kątów poziomych jest niewskazane
Niewłaściwy dobór trzech obiektów do namierzania może spowodować, że pozycja błędna nie będzie możliwa do skorygowania. Niedopuszczalny jest wybór obiektów L\, Li i Li, które leżą na wspólnym okręgu, gdy obserwator, zamiast namiarów na trzy obiekty, określa dwa kąty poziome na bazy L\-Li i Li - Li (rys. 13.20).
Wybór obiektów pomiarowych powinien więc spełniać następujące kryteria:
1) do obserwacji należy wybierać obiekty leżące mniej więcej na jednej linii i odpowiednio od siebie oddalone;
2) obiekt środkowy Li i obserwator winni znajdować się po tej samej stronie linii łączącej obiekty skrajne, wówczas zostaną poprawnie spełnione kryteria dokładności pozycji;
3) obiekty obserwowane mogą być wierzchołkami trójkąta, wewnątrz którego znajduje się obserwator;
4) obiekty obserwowane i obserwator nie mogą znajdować się na wspólnym okręgu koła, jeśli planowana jest metoda określania pozycji z 2 kątów poziomych;
5) do pomiarów nie należy wybierać kątów poziomych, jeśli suma kątów a + [i oraz kąt y przy Li dają łącznie wartość 360°.
Wyszukiwarka
Podobne podstrony:
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
304 (15) 304 Podstawy nawigacji morskiej • obserwowanie przebytej drogi według rad
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
250 (15) 250 Podstawy nawigacji morskiej Błędy systematyczne można usunąć przez zastosowanie protrak
254 (15) 254 Podstawy nawigaqi morskiej Można wymienić wiele innych możliwości określania pozycji w
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
więcej podobnych podstron