270 (16)
270 Podstawy nawigacji morskiej
270 Podstawy nawigacji morskiej
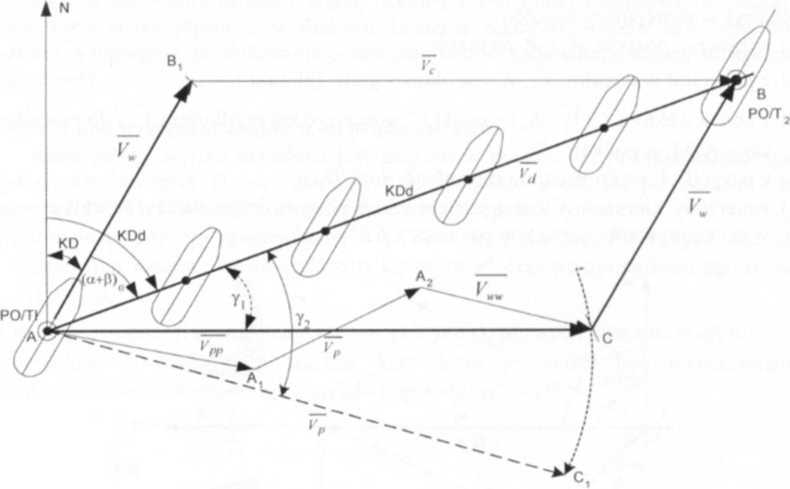
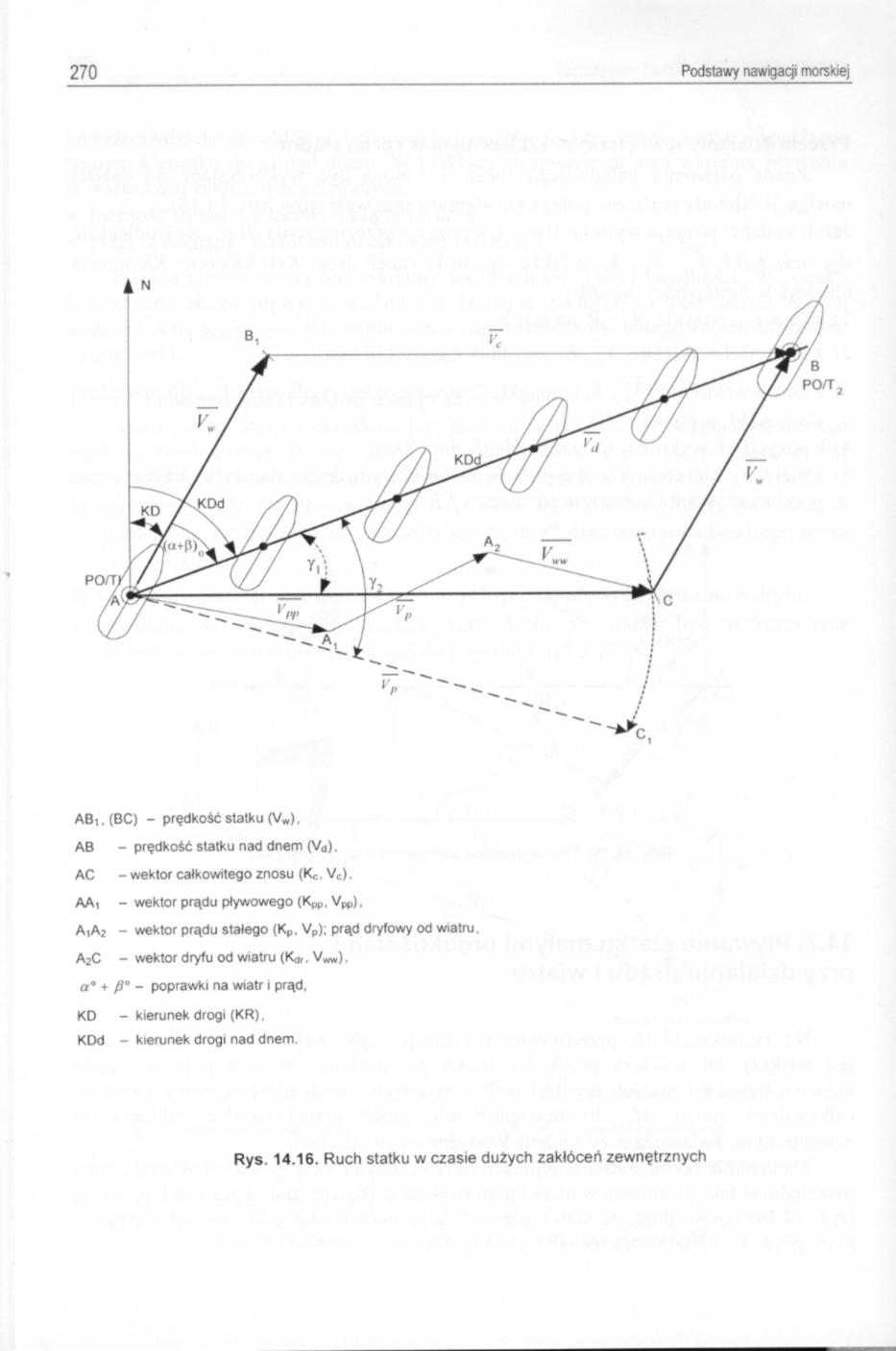
ABt.(BC) - prędkość statku (V„).
AB - prędkość statku nad dnem (V<i),
AC - wektor całkowitego znosu (Kc. Vc).
AAi - wektor prądu pływowego (Kpp. V»).
A,Aj - wektor prądu stałego (K^. Vp); prąd dryfowy od wiatru A2C - wektor dryfu od wiatru (K», V„w).
+ p° - poprawki na wiatr i prąd.
KD - kierunek drogi (KR).
KDd - kierunek drogi nad dnem
Wyszukiwarka
Podobne podstrony:
270 (30) - 270 - 271 Zadanie 3.16 Na podstawie rys. 3.16 dla obwodu a) możemy napisać następuj
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
268 (16) 268 Podstawy nawigacji morskiej na przeciwdziałanie zakłóceniom zewnętrznym, w celu utrzyma
280 (16) 280 Podstawy nawgac
240 (18) 240 Podstawy nawigacji morskiej Wartość wektora r zejścia statku z osi toru zależy od dwóch
skanuj0010 (58) — 16 — DEFINICJE I PODSTAWOWE POJĘCIA ZWIĄZANE Z TURYSTYKĄ d)
img007 2 16. Na podstawie zamieszczonego tysunku rozpozna] zobrazowane zjawiska katas troficzne i ok
img233 (16) 100 2. PODSTAWY PS/( Zl I NIC TWA dobnie krótkie wędrówki z miejsc sło
skanuj0010 (58) — 16 — DEFINICJE I PODSTAWOWE POJĘCIA ZWIĄZANE Z TURYSTYKĄ d)
Zjazd V 10.04.2015 piątek Godzina Przedmiot Wykładowca 16:00-16:45 Podstawy prawa
13.02.2015 piątek Godzina Przedmiot Wykładowca 16:00-16:45 Podstawy prawa
Godzina Przedmiot Wykładowca 16:00-16:45 Podstawy prawa pracy A.
rozdział 1 (16) 46 Podstawy marketingu nieskuteczne, powodują zbędne koszty, a dod
skanuj0014 6 Kolokwium nr 2 Grupa g. 14.15-16.00 Podstawy automatyki i sterowania I 20 stycznia 2010
więcej podobnych podstron