268 (16)
268 Podstawy nawigacji morskiej
na przeciwdziałanie zakłóceniom zewnętrznym, w celu utrzymania statku na zaplanowanym kierunku drogi nad dnem. W praktyce stosowane są dwa warianty pływania w warunkach zakłóceń zewnętrznych:
• bierność wobec zakłóceń od prądu i wiatru,
• przeciwdziałanie zakłóceniom od prądu i wiatru.
Zwykle stosowane są oba warianty według takiej samej kolejności. W początkowej fazie statek pływa w warunkach działania zakłóceń, w celu określenia ich wartości, a następnie, po dokonaniu oceny parametrów całkowitego znosu, stosowane są poprawki.
Bierność pod względem zakłóceń od prądu i wiatru
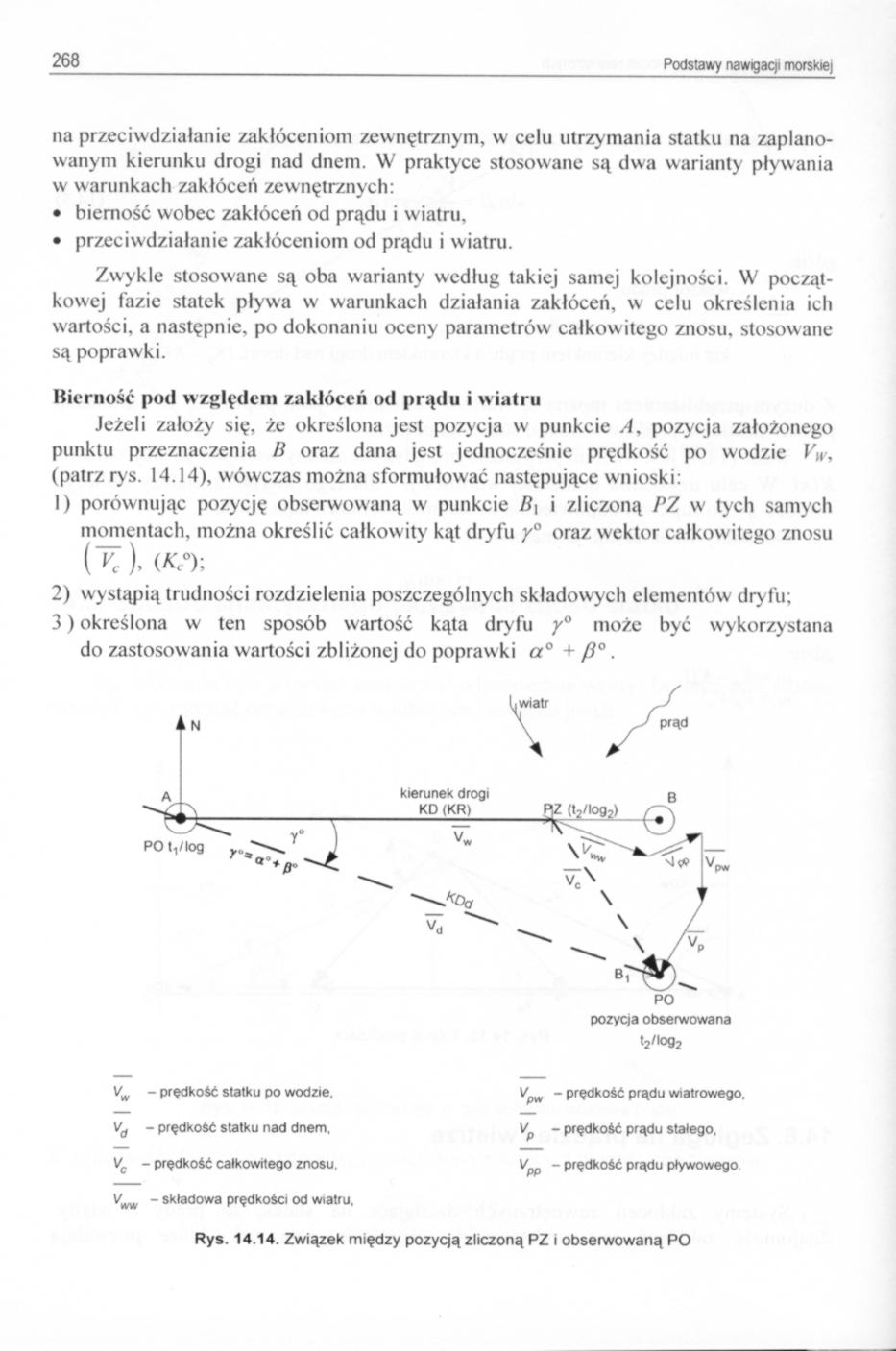
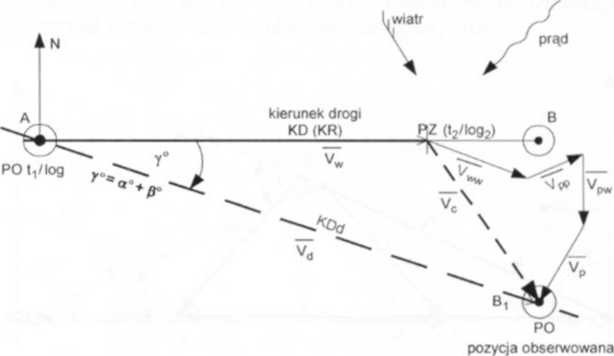
Jeżeli założy się, że określona jest pozycja w punkcie A, pozycja założonego punktu przeznaczenia li oraz dana jest jednocześnie prędkość po wodzie Vw, (patrz rys. 14.14), wówczas można sformułować następujące wnioski:
1) porównując pozycję obserwowaną w punkcie B\ i zliczoną PZ w tych samych momentach, można określić całkowity kąt dryfu y° oraz wektor całkowitego znosu (Tc ), (Ae°);
2) wystąpią trudności rozdzielenia poszczególnych składowych elementów dry fu;
3) określona w ten sposób wartość kąta dryfu y° może być wykorzystana do zastosowania wartości zbliżonej do poprawki a° + /?°.
t2/tog2
|
- prędkość statku po wodzie. |
V |
- prędkość prądu wiatrowego. |
|
- prędkość statku nad dnem. |
- prędkość prądu stałego. | |
|
- prędkość całkowitego znosu, |
- prędkość prądu pływowego | |
|
- składowa prędkości od wiatru. |
Rys. 14.14. Związek między pozycją zliczoną PZ i obserwowaną PO
Wyszukiwarka
Podobne podstrony:
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
436 (8) 436 Podstawy nawigacji morskiej na wachcie, i być tak wykonany, aby zapewniał prowadzenie be
438 (7) 438 Podstawy nawigaqi morskie) Na rysunku 20.7 pokazany jest szkic rejonu kanału angielskieg
378 (9) 378 Podstawy nawigacji morskiej Na rysunkach 19.2 i 19.3 pokazane są związki między poziomam
386 (7) 386 Podstawy nawigaqi morskiej Na wszystkich mapach nawigacyjnych, w części tytułowej, podan
410 (6) 410 Podstawy nawigacji morskie) Na podstawie analizy krzywej pływu, wyznaczonej metodą ekspe
270 (16) 270 Podstawy nawigacji morskiej 270 Podstawy nawigacji morskiej ABt.(BC) - prędkość statku
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
336 (13) 336 Podstawy nawigaqi morskiej Wiele instytutów badawczych na świecie od lal zajmuje się pr
344 (12) 344 Podstawy nawigacji morskiei • Branie wody na pokład i slamming powodu
346 (10) 346 Podstawy nawigacji morskiej Informacje o stanie i prognozie pogody na obszarze od
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
366 (8) 366 Podstawy nawigaqi morskiej takie mają wyraźną przewagę nad załogami statków, ze względu
368 (9) 368 Podstawy nawigacji morskiej18.16.2. Organizacja lądowego ośrodka nawigacji meteorologicz
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
więcej podobnych podstron