386 (7)
386 Podstawy nawigaqi morskiej
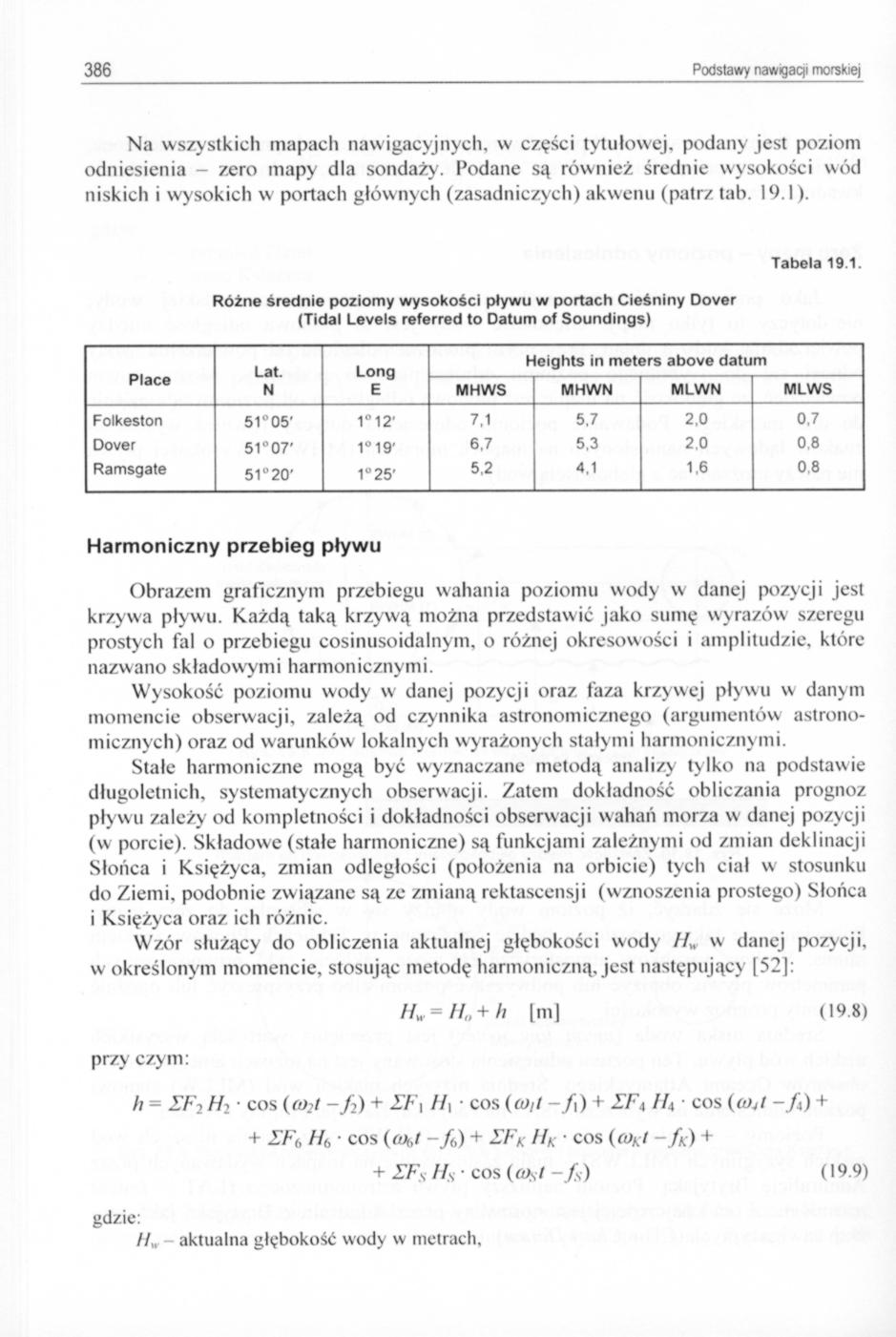
Na wszystkich mapach nawigacyjnych, w części tytułowej, podany jest poziom odniesienia - zero mapy dla sondaży. Podane są również średnie wysokości wód niskich i wysokich w portach głównych (zasadniczych) akwenu (patrz tab. 19.1).
Tabela 19.1.
Różne średnie poziomy wysokości pływu w portach Cieśniny Dover (Tidal Levels referred to Datum of Soundings)
|
Place |
Lat. N |
Long E |
Heights in meters above datum | |||
|
MHWS |
MHWN |
MLWN |
MLWS | |||
|
Folkeston |
51° 05' |
1° 12' |
7,1 |
5,7 |
2,0 |
0,7 |
|
Dover |
5r07' |
1° 19' |
6.7 |
5,3 |
2.0 |
0.8 |
|
Ramsgate |
51"20' |
1"25’ |
5,2 |
4.1 |
1.6 |
0.8 |
Harmoniczny przebieg pływu
Obrazem graficznym przebiegu wahania poziomu wody w danej pozycji jest krzywa pływu. Każdą taką krzywą można przedstawić jako sumę wy razów szeregu prostych fal o przebiegu cosinusoidalnym, o różnej okresowości i amplitudzie, które nazwano składowymi harmonicznymi.
Wysokość poziomu wody w danej pozycji oraz. faza krzywej pływu w danym momencie obserwacji, zależą od czynnika astronomicznego (argumentów astronomicznych) oraz od warunków lokalnych wyrażonych stałymi harmonicznymi.
Stale harmoniczne mogą być wyznaczane metodą analizy tylko na podstawie długoletnich, systematycznych obserwacji. Zatem dokładność obliczania prognoz pływu zależy od kompletności i dokładności obserwacji wahań morza w danej pozycji (w porcie). Składowe (stałe harmoniczne) są funkcjami zależnymi od zmian deklinacji Słońca i Księżyca, zmian odległości (położenia na orbicie) tycli ciał w stosunku do Ziemi, podobnie związane są ze zmianą rektascensji (wznoszenia prostego) Słońca i Księżyca oraz ich różnic.
Wzór służący do obliczenia aktualnej głębokości wody IL w danej pozycji, w określonym momencie, stosując metodę harmoniczną, jest następujący [52]:
Hw = H„+h [m] (19.8)
przy czym:
h = EF2 Hi • cos (ry>/ - fi) + EF\ H\ • cos (<u// - f) + 2F4 //4 • cos (coj -/4) +
+ IF(I Hb ■ cos (ft*,/-f) + EFk llK • cos {coKt -fK) +
+ ZFS Hs • cos ((OsI -fs) (19.9)
gdzie:
//„ aktualna głębokość wody w metrach.
Wyszukiwarka
Podobne podstrony:
378 (9) 378 Podstawy nawigacji morskiej Na rysunkach 19.2 i 19.3 pokazane są związki między poziomam
7. Na podstawie teksiu odpowiedz na pytania. Wokół czego krążą planety? Ile jest planet Układu
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
436 (8) 436 Podstawy nawigacji morskiej na wachcie, i być tak wykonany, aby zapewniał prowadzenie be
438 (7) 438 Podstawy nawigaqi morskie) Na rysunku 20.7 pokazany jest szkic rejonu kanału angielskieg
Wprowadzenie Radar w nawigacji morskiej na statkach handlowych wykorzystywany jest przede wszystkim
336 (13) 336 Podstawy nawigaqi morskiej Wiele instytutów badawczych na świecie od lal zajmuje się pr
344 (12) 344 Podstawy nawigacji morskiei • Branie wody na pokład i slamming powodu
346 (10) 346 Podstawy nawigacji morskiej Informacje o stanie i prognozie pogody na obszarze od
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
362 (8) 362 Podstawy nawigaqi morskiej Programowanie dynamiczne jest najskuteczniejsze ze wszystkich
366 (8) 366 Podstawy nawigaqi morskiej takie mają wyraźną przewagę nad załogami statków, ze względu
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
398 (6) 398 Podstawry nawigaqi morskiej Określanie rodzaju pływu na podstawie stałych
więcej podobnych podstron