410 (6)
410 Podstawy nawigacji morskie)
Na podstawie analizy krzywej pływu, wyznaczonej metodą eksperymentalną w danym porcie, okazało się. że tak uzyskane składowe harmoniczne są zgodne z harmonicznymi pływu zrównoważonego, co oznacza, że wystąpienia wód wysokich i niskich obserwowanego pływu, są zgodne z okresami pływu zrównoważonego; podobnie prędkości kątowe tych składowych są sobie równe w obu typach pływów. Określono już kilkaset składowych harmonicznych dla głównych portów - zwanych standardowymi oraz dla ponad 10 tysięcy portów dołączonych. Jednak nadal w wielu portach dane o pływach są niekompletne i wymagają dalszych obserwacji.
W liczbie 400 określonych składowych harmonicznych jest około 150 dobowych składowych, 120 półdobowych. 100 długookresowych o okresach ponad 14 dni oraz 25 krótkookresowych o okresach poniżej 9 godzin (8.6-4).
Zasadnicze określenia dotyczące pływ u harmonicznego
Niżej podano podstawowe definicje określające przebieg pływ u.
1. Odstęp czasu między momentami bezpośrednio występujących wód wysokich lub wód niskich, wyrażony w mierze stopniowej, wynosi 360°.
2. Odstęp czasu wyrażony w mierze stopniowej, podzielony przez odstęp czasu między momentami kolejno występujących dwóch wód wysokich, określa wartość prędkości kątowej (o>). która wynosi:
360°
2Ąh
15°/godz.
(O, = ■
• dla pływu dobowego:
• dla pływu półdobowego:
m2
360°
12*
= 307godz.
3. Wysokość wody wysokiej w stosunku do średniego poziomu morza, nazywa się amplitudą pływ u. Amplituda jest rów na połowie skoku, czyli:

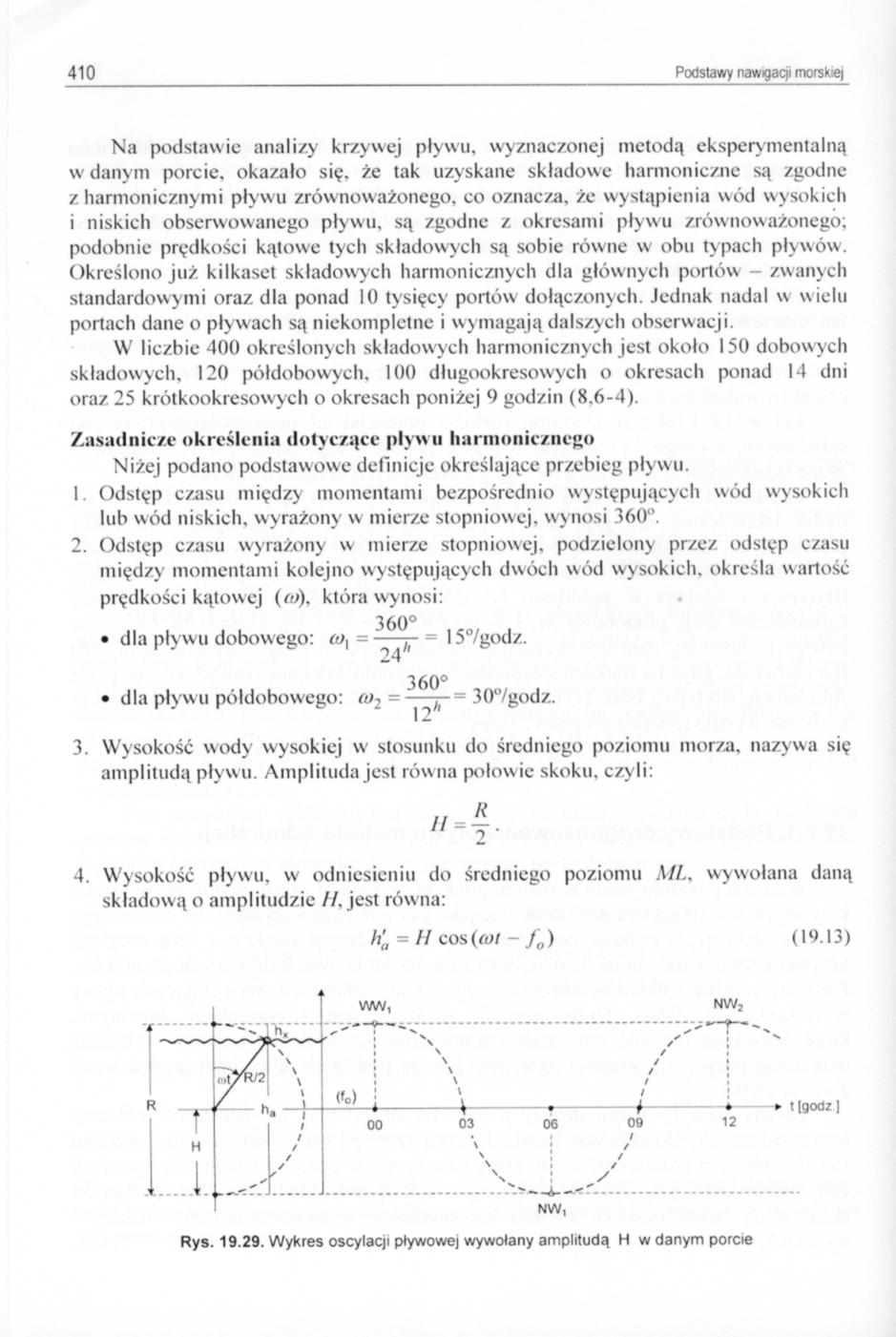
4. Wysokość pływu, w odniesieniu do średniego poziomu ML, wywołana daną składową o amplitudzie //.jest równa:
h'a = H cos(<ot - f0) (19.13)
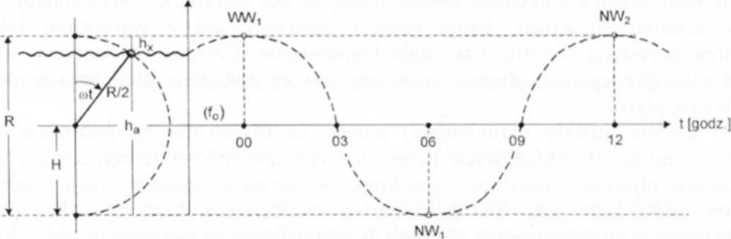
Rys. 19.29. Wykres oscylacji pływowej wywołany amplitudą H w danym porcie
Wyszukiwarka
Podobne podstrony:
436 (8) 436 Podstawy nawigacji morskiej na wachcie, i być tak wykonany, aby zapewniał prowadzenie be
438 (7) 438 Podstawy nawigaqi morskie) Na rysunku 20.7 pokazany jest szkic rejonu kanału angielskieg
378 (9) 378 Podstawy nawigacji morskiej Na rysunkach 19.2 i 19.3 pokazane są związki między poziomam
386 (7) 386 Podstawy nawigaqi morskiej Na wszystkich mapach nawigacyjnych, w części tytułowej, podan
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
268 (16) 268 Podstawy nawigacji morskiej na przeciwdziałanie zakłóceniom zewnętrznym, w celu utrzyma
392 (7) 392 Podstawy nawigacji morskiej znaczne wahania (nierówności) w wysokości pływu w ciągu doby
Wprowadzenie Radar w nawigacji morskiej na statkach handlowych wykorzystywany jest przede wszystkim
SE20101110�014 Rozdział 2Baza wiedzy systemu eksperckiego Na etapie analizy problemu inżynier wiedzy
S5008130 58 Na zakończenie prąd ls zostanie wyznaczony metodą potencjałów węzłowych. Korzystamy tu z
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
441 (5) 20 Podstawy planowania nawigac
więcej podobnych podstron