332 (12)
332 Podstawy nawgaqi morskie)
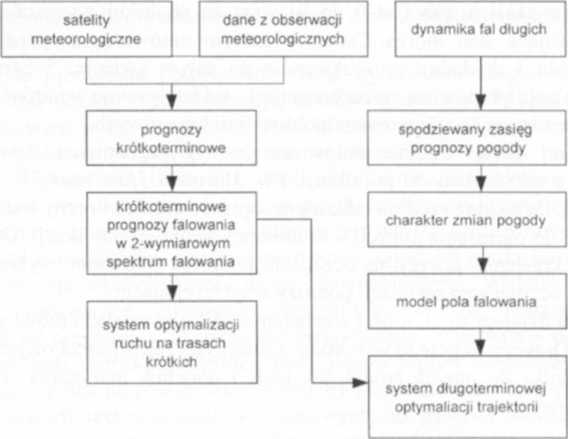
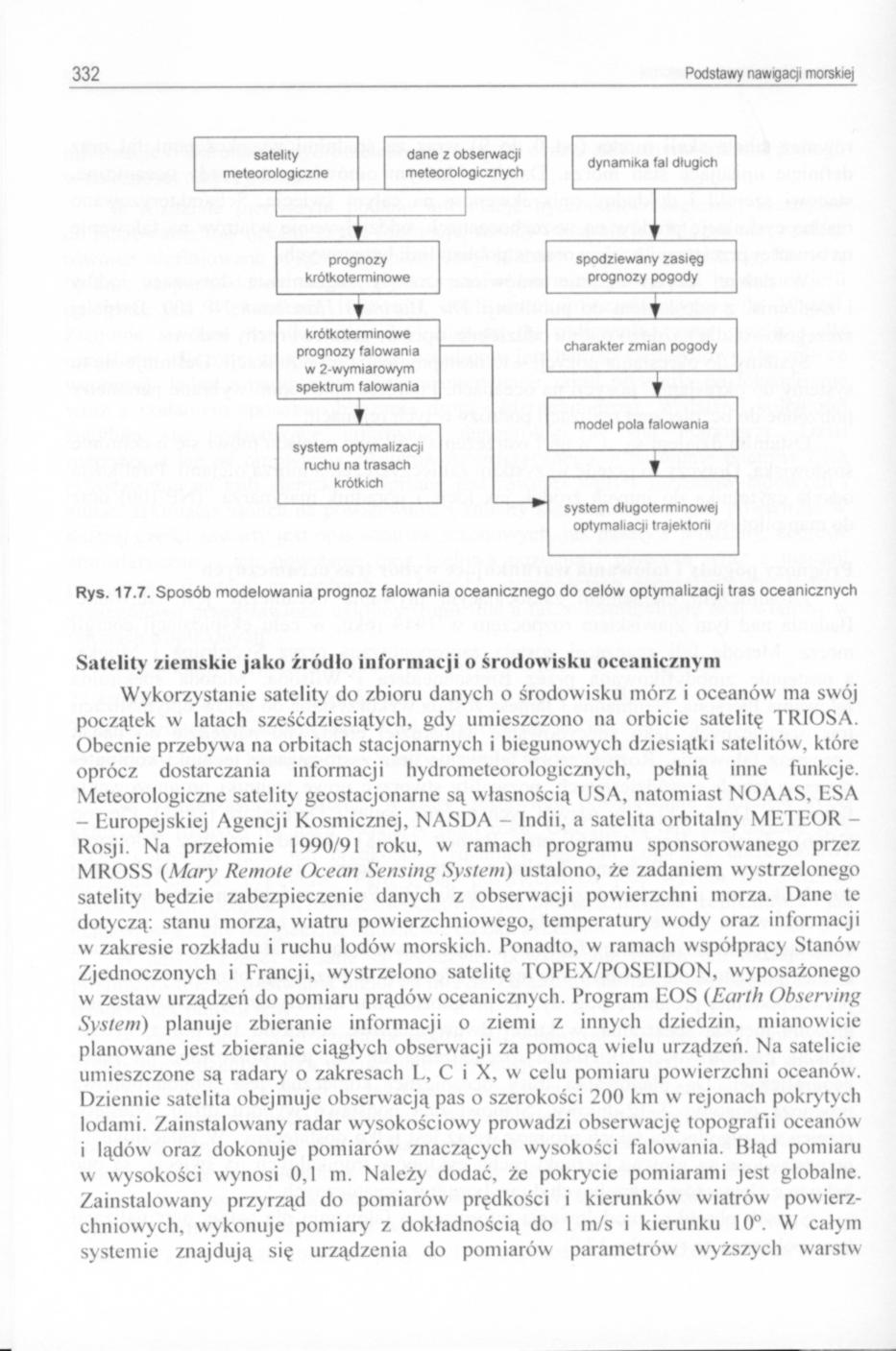
Rys. 17.7. Sposób modelowania prognoz falowania oceanicznego do celów optymalizacji tras oceanicznych
Satelity ziemskie jako źródło informacji o środowisku oceanicznym
Wykorzystanie satelity do zbioru danych o środowisku mórz i oceanów ma swój początek w latach sześćdziesiątych, gdy umieszczono na orbicie satelitę TRIOSA. Obecnie przebywa na orbitach stacjonarnych i biegunowych dziesiątki satelitów, które oprócz dostarczania informacji hydrometeorologicznych, pełnią inne funkcje. Meteorologiczne satelity geostacjonarne są własnością USA, natomiast NOAAS, ESA - Europejskiej Agencji Kosmicznej, NASDA - Indii, a satelita orbitalny METEOR -Rosji. Na przełomie 1990/91 roku, w ramach programu sponsorowanego przez MROSS (Mary Rewale Ocean Sensing System) ustalono, że zadaniem wystrzelonego satelity będzie zabezpieczenie danych z obserwacji powierzchni morza. Dane te dotyczą: stanu morza, wiatru powierzchniowego, temperatury wody oraz informacji w zakresie rozkładu i ruchu lodów morskich. Ponadto, w ramach współpracy Stanów Zjednoczonych i Francji, wystrzelono satelitę TOPEX/POSElDON, wyposażonego w zestaw urządzeń do pomiaru prądów oceanicznych. Program EOS (Earth Obsenring System) planuje zbieranie informacji o ziemi z innych dziedzin, mianowicie planowane jest zbieranie ciągłych obserwacji za pomocą wielu urządzeń. Na satelicie umieszczone są radary o zakresach L, C i X, w celu pomiaru powierzchni oceanów. Dziennie satelita obejmuje obserwacją pas o szerokości 200 km w rejonach pokrytych lodami. Zainstalowany radar wysokościowy prowadzi obserwację topografii oceanów i lądów' oraz dokonuje pomiarów znaczących wysokości falowania. Błąd pomiaru w wysokości wynosi 0,l m. Należy dodać, że pokrycie pomiarami jest globalne. Zainstalowany przyrząd do pomiarów prędkości i kierunków wiatrów powierzchniowych, wykonuje pomiary z dokładnością do l m/s i kierunku 10°. W całym systemie znajdują się urządzenia do pomiarów parametrów wyższych warstw
Wyszukiwarka
Podobne podstrony:
396 (7) 396 Podstawy nawgaqi morskie) Rys. 19.20. Przykłady typowych krzywych ptywu mieszanego [11]
348 (12) 348 Podstawy nawigacji morskiej18.9. Unikanie stałych i ruchomych obszarów wysokiego falowa
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
skrypt072 (2) 142 Laboratorium Podstaw Kkktrotechnlki 1 O C °-« B o-mK>- A °——o W, Rys.8,17. Ukła
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
292 (14) 292 Podstawy nawgaqi morskiej Metoda polega na wyznaczeniu na mapie obiektów dobrze odbijaj
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
312 (12) 312 Podstawy nawigacji morskiej • szerokości charakterystyki anteny, •
326 (12) 326 Podstawy nawigacji morskiej • średnioterminowych prognoz opisujących
59586 Obraz (2536) Na podstawie przedstawionych na rys. 17.1 struktur, mogą być budowane skomplikowa
modem001 Cz.. /• Podstawy transmisji danych Cz.. /• Podstawy transmisji danych Rys. 3.17. Konfigurac
344 (12) 344 Podstawy nawigacji morskiei • Branie wody na pokład i slamming powodu
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
więcej podobnych podstron