312 (12)
312 Podstawy nawigacji morskiej
• szerokości charakterystyki anteny,
• rodzaju kreski namiarowej,
• ustawienia kreski namiarowej (krzyża),
• warunków zewnętrznych, stanu morza, widzialności itp.
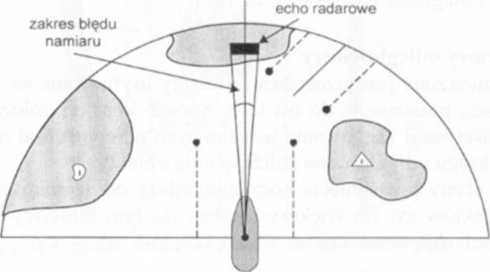
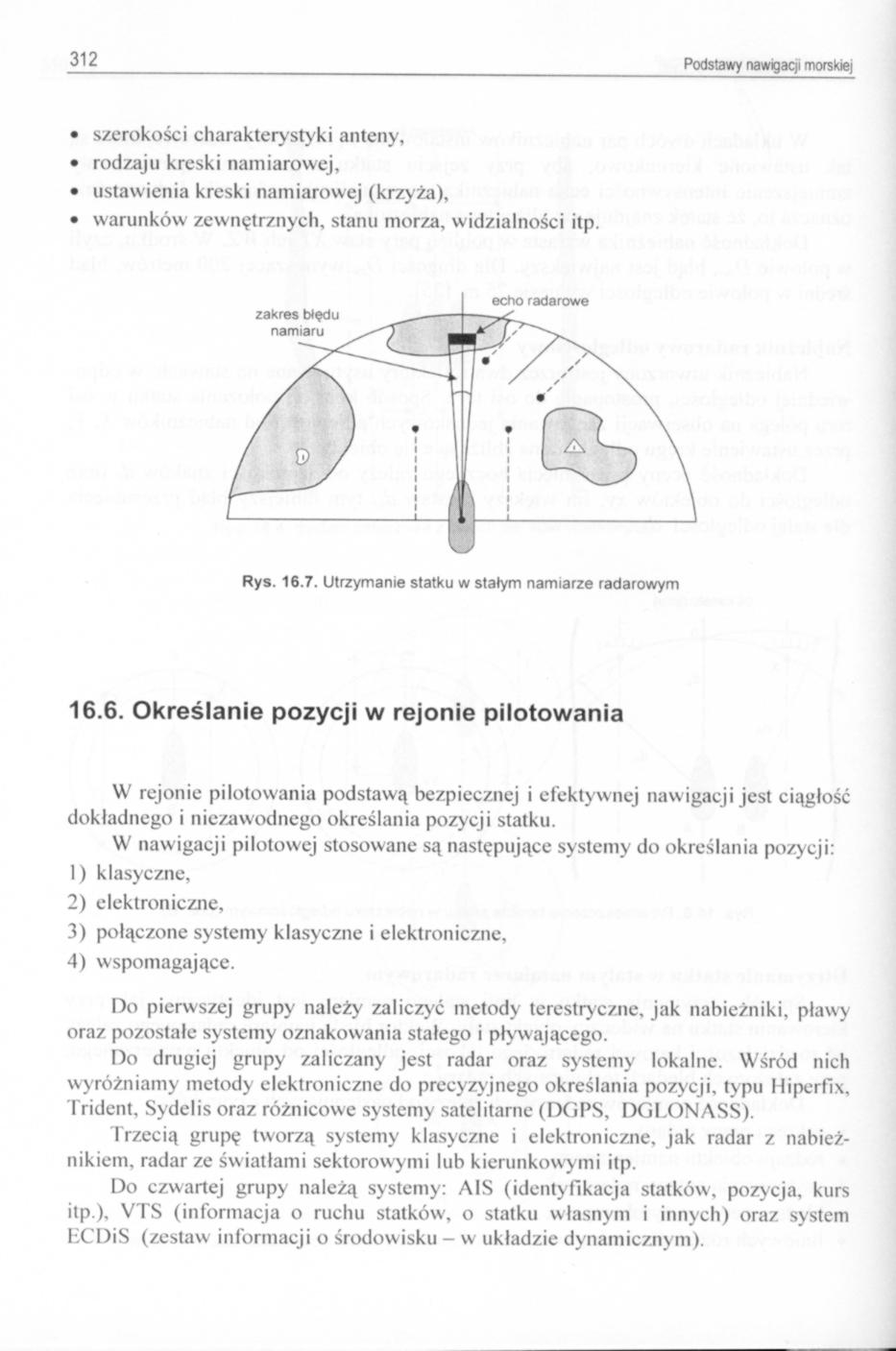
Rys. 16.7. Utrzymanie statku w stałym namiarze radarowym
16.6. Określanie pozycji w rejonie pilotowania
W rejonie pilotowania podstawą bezpiecznej i efektywnej nawigacji jest ciągłość dokładnego i niezawodnego określania pozycji statku.
W nawigacji pilotowej stosowane są następujące systemy do określania pozycji:
1) klasyczne,
2) elektroniczne,
3) połączone systemy klasyczne i elektroniczne,
4) wspomagające.
Do pierwszej grupy należy zaliczyć metody terestryczne. jak nabieżniki, pławy oraz pozostałe systemy oznakowania stałego i pływającego.
Do drugiej grupy zaliczany jest radar oraz systemy lokalne. Wśród nich wyróżniamy metody elektroniczne do precyzyjnego określania pozycji, typu Hiperfix, Trident, Sydelis oraz różnicowe systemy satelitarne (DGPS, DGLONASS).
Trzecią grupę tworzą systemy klasyczne i elektroniczne, jak radar z nabież-nikiem. radar ze światłami sektorowymi lub kierunkowymi itp.
Do czwartej grupy należą systemy: AIS (identyfikacja statków-, pozycja, kurs itp.), VTS (informacja o ruchu statków-, o statku własnym i innych) oraz system ECDiS (zestaw informacji o środowisku - w układzie dynamicznym).
Wyszukiwarka
Podobne podstrony:
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
326 (12) 326 Podstawy nawigacji morskiej • średnioterminowych prognoz opisujących
344 (12) 344 Podstawy nawigacji morskiei • Branie wody na pokład i slamming powodu
348 (12) 348 Podstawy nawigacji morskiej18.9. Unikanie stałych i ruchomych obszarów wysokiego falowa
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
304 (15) 304 Podstawy nawigacji morskiej • obserwowanie przebytej drogi według rad
308 (14) 308 Podstawy nawigaqi morskie) Dyskusja kapitana z pilotem przy tworzeniu aktualnego planu
więcej podobnych podstron