3568
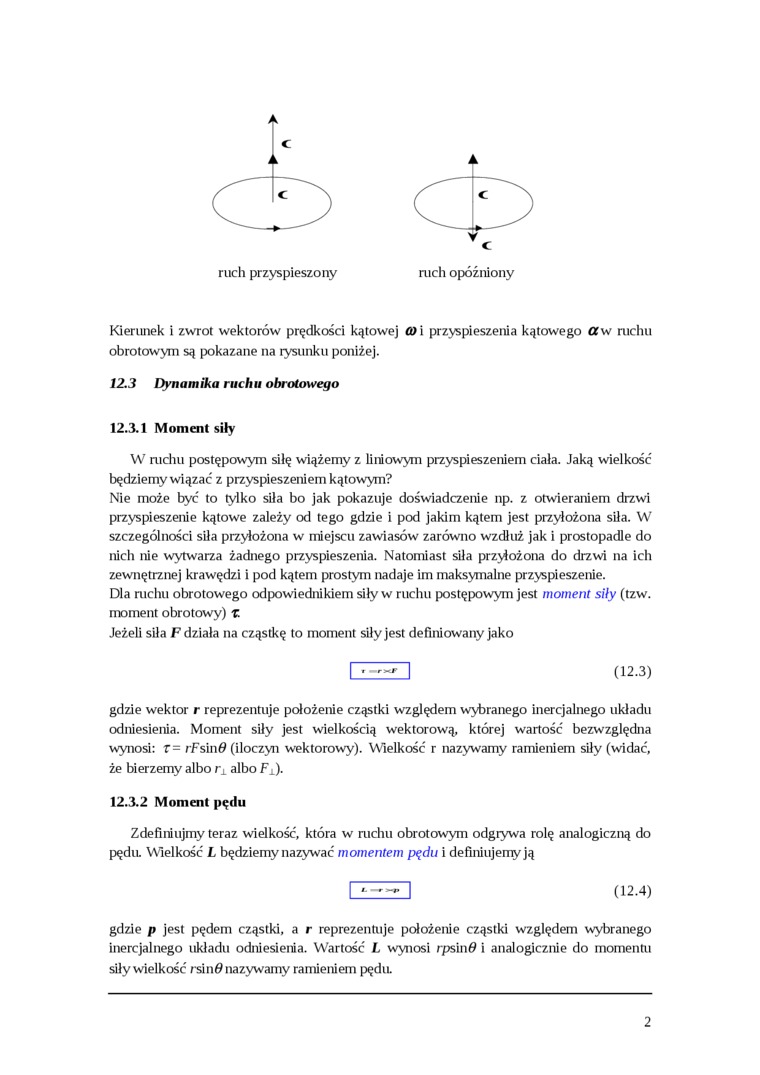
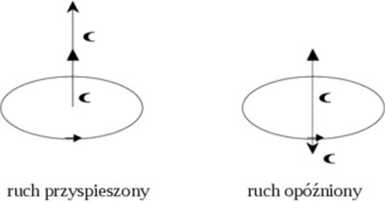
Kierunek i zwrot wektorów prędkości kątowej 0) i przyspieszenia kątowego a w ruchu obrotowym są pokazane na rysunku poniżej.
12.3 Dynamika ruchu obrotowego 12.3.1 Moment siły
W ruchu postępowym siłę wiążemy z liniowym przyspieszeniem ciała. Jaką wielkość będziemy wiązać z przyspieszeniem kątowym?
Nie może być to tylko siła bo jak pokazuje doświadczenie np. z otwieraniem drzwi przyspieszenie kątowe zależy od tego gdzie i pod jakim kątem jest przyłożona siła. W szczególności siła przyłożona w miejscu zawiasów zarówno wzdłuż jak i prostopadle do nich nie wytwarza żadnego przyspieszenia. Natomiast siła przyłożona do drzwi na ich zewnętrznej krawędzi i pod kątem prostym nadaje im maksymalne przyspieszenie.
Dla ruchu obrotowego odpowiednikiem siły w ruchu postępowym jest moment siły (tzw. moment obrotowy) %.
Jeżeli siła F działa na cząstkę to moment siły jest definiowany jako
I — I (12.3)
gdzie wektor r reprezentuje położenie cząstki względem wybranego inercjalnego układu odniesienia. Moment siły jest wielkością wektorową, której wartość bezwzględna wynosi: X- rFsinć? (iloczyn wektorowy). Wielkość r nazywamy ramieniem siły (widać, że bierzemy albo rx albo F±).
12.3.2 Moment pędu
Zdefiniujmy teraz wielkość, która w mchu obrotowym odgrywa rolę analogiczną do pędu. Wielkość L będziemy nazywać momentem pędu i definiujemy ją
(12.4)
gdzie p jest pędem cząstki, a r reprezentuje położenie cząstki względem wybranego inercjalnego układu odniesienia. Wartość L wynosi rpsrnO i analogicznie do momentu siły wielkość rsind nazywamy ramieniem pędu.
2
Wyszukiwarka
Podobne podstrony:
76 77 Pęd jest wielkością wektorową. Jego kierunek i zwrot są takie same jak kierunek i zwrot wektor
76 77 Pęd jest wielkością wektorową. Jego kierunek i zwrot są takie same jak kierunek i zwrot wektor
img069 (21) Z kolei podwojony iloczyn wektorowy prędkości kątowej • i prędkości względnej vw jest pr
img069 (21) Z kolei podwojony iloczyn wektorowy prędkości kątowej • i prędkości względnej vw jest pr
P1010934 (5) Wektor przyspieszenia kątowego określamy jako pochodną względem czasu wektora prędkości
P1010934 (5) Wektor przyspieszenia kątowego określamy jako pochodną względem czasu wektora prędkości
img069 (21) Z kolei podwojony iloczyn wektorowy prędkości kątowej • i prędkości względnej vw jest pr
84254 P1010934 (6) Wektor przyspieszenia kątowego określamy jako pochodną względem czasu wektora prę
gdzie wektor prędkości kątowej oj jest taki sam dla wszystkich punktów bryły i określa chwilową prę
Żyroskop mechaniczny - pomiar prędkości kątowej. Zasada działania opiera się na własności inercji
30818 IMG?91 (2) Kierunek i zwrot wektora naporu
mech2 39 76 5*2. Określenie prędkości bezwzględnej przyspieszenia bezwzględnego punktu w obrotowym r
mech2 39 76 5*2. Określenie prędkości bezwzględnej przyspieszenia bezwzględnego punktu w obrotowym r
więcej podobnych podstron