123461
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna
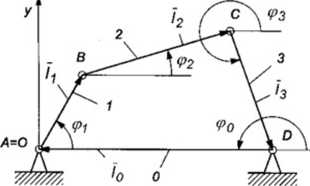
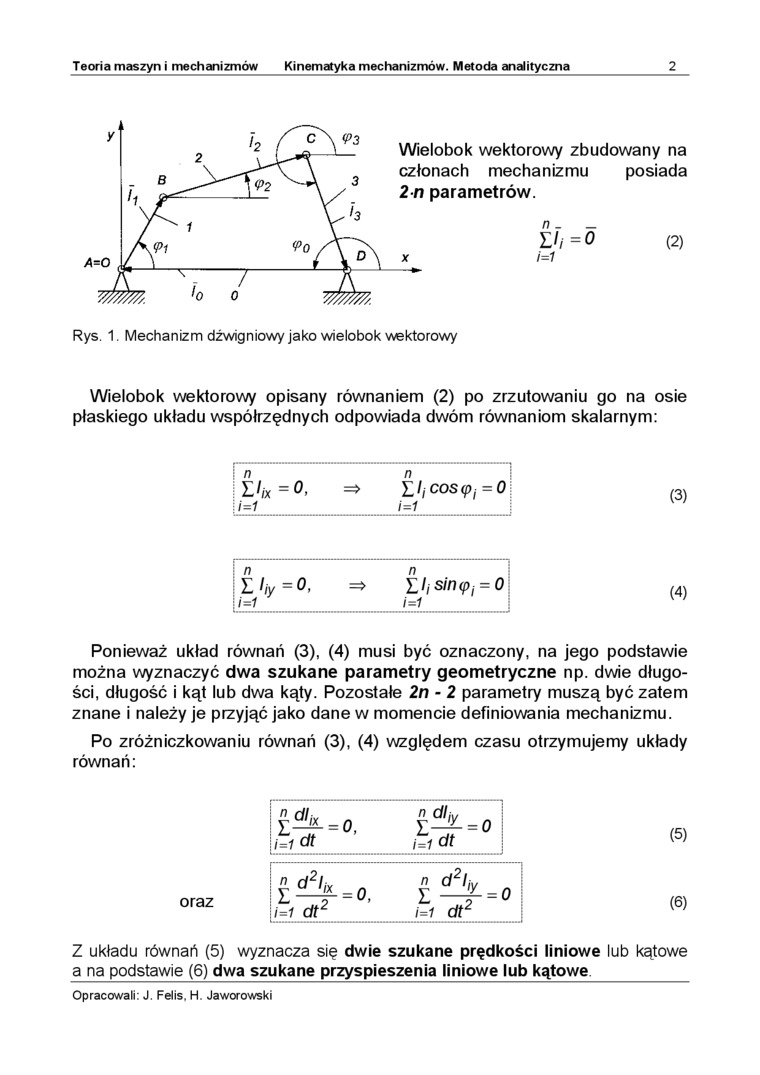
Rys. 1. Mechanizm dźwigniowy jako wielobok wektorowy
2
Wielobok wektorowy zbudowany na członach mechanizmu posiada
2-n parametrów.
Vi=0 (2)
x i=1
Wielobok wektorowy opisany równaniem (2) po zrzutowaniu go na osie płaskiego układu współrzędnych odpowiada dwóm równaniom skalarnym:
|
Vix=0, i-1 |
n => £ lj cos (pj = 0 i=1 |
|
o" II |
U $2 3' ;6 II o |
(3)
(4)
Ponieważ układ równań (3), (4) musi być oznaczony, na jego podstawie można wyznaczyć dwa szukane parametry geometryczne np. dwie długości, długość i kąt lub dwa kąty. Pozostałe 2n - 2 parametry muszą być zatem znane i należy je przyjąć jako dane w momencie definiowania mechanizmu.
Po zróżniczkowaniu równań (3), (4) względem czasu otrzymujemy układy równań:
oraz
M dt
"dljy
Mdt
L —y-
i=l dt2
d2r
i=i dt2
(5)
(6)
Z układu równań (5) wyznacza się dwie szukane prędkości liniowe lub kątowe a na podstawie (6) dwa szukane przyspieszenia liniowe lub kątowe._
Opracowali: J. Felis, H. Jaworowski
Wyszukiwarka
Podobne podstrony:
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 1 ANALIZA KINEMATYCZNA MECHAN
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda grafoanalityczna_2Ruch
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda
Teoria maszyn i części maszyn Teoria maszyn i mechanizmów, kinematyka Karolczuk
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Przekładnie kołowe 2 Jeżeli moduł przełożenia
Stefan Miller TEORIA MASZYN I MECHANIZMÓW Analiza układów kinematycznych V
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Przekładnie kołowe 1ANALIZA KINEMATYCZNA PRZEKŁA
TEORIA MASZYN I MECHANIZMÓW JÓZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIKCZEŚĆ IANALIZA
Teoria maszyn i mechanizmów Dynamika Mechanizmów. Analiza kinetostatyczna_2_ Podział sił według kilk
Teoria maszyn i mechanizmów Struktura mechanizmów Stopnie swobody członu sztywnego Liczbą stopni swo
Teoria maszyn i mechanizmów Dynamika Mechanizmów Wyrównoważanie 2 Wyrównoważenie technologiczne
PARSZtWSKI Teoria maszyn i mechanizmów
fARSZEWSKI Teoria maszyn i mechanizmów
Teoria maszyn i mechanizmów Dynamika Mechanizmów. Analiza
Teoria maszyn i mechanizmów Dynamika Mechanizmów. Analiza
Teoria maszyn i mechanizmów Dynamika Mechanizmów. Analiza
więcej podobnych podstron