Akademia Techniczno - Humanistyczna w Bielsku - Białej
kierunek Elektrotechnika
Rok 3, sem. VI
Sprawozdanie z laboratorium automatyki i sterownia
Temat: Regulatory pneumatyczne - typu P, PI, PID.
Cel ćwiczenia: Celem ćwiczenia jest poznanie własności statycznych (w przypadku regulatora „P”) i własności dynamicznych typowych regulatorów ciągłych na przykładzie regulatorów pneumatycznych typu P (regulator proporcjonalny), PI (regulator proporcjonalno - całkujący) i PID (regulator proporcjonalno - całkująco - różniczkujący).
Data wykonania ćwiczenia: 20.03.2003 r.
Grupa: Sprawozdanie wykonali:
Dariusz Haręża Dariusz Marszałek
Paweł Knapek Jarosław Śledź
Grzegorz Knyps
Dariusz Marszałek
Michał Matusiak
Krzysztof Stopczak
Adam Szafron
Jarosław Śledź
I. Układ pomiarowy jest identyczny dla wszystkich regulatorów.
II. Schematy ideowe regulatorów
Typu P
Typu PI
Typu PID
III. Wyniki pomiarów.
1. Regulator proporcjonalny - typu P.
Xp = 150 % pp = 25 kPa |
Xp = 150 % pp = 45 kPa |
Xp = 250 % pp = 25 kPa |
|||
Wartość uchybu regulacji pe = pw - py |
Odpowiedź regulatora pu |
Wartość uchybu regulacji pe = pw - py |
Odpowiedź regulatora pu |
Wartość uchybu regulacji pe = pw - py |
Odpowiedź regulatora pu |
% |
kPa |
% |
kPa |
% |
kPa |
− 50 |
3 |
− 50 |
20 |
− 50 |
14 |
− 40 |
7,5 |
− 40 |
25 |
− 40 |
16 |
− 30 |
12 |
− 30 |
30 |
− 30 |
18 |
− 20 |
16 |
− 20 |
34 |
− 20 |
21 |
− 10 |
21 |
− 10 |
39 |
− 10 |
24 |
0 |
25 |
0 |
44 |
0 |
26 |
+ 10 |
30 |
+ 10 |
48 |
+ 10 |
30 |
+ 20 |
34 |
+ 20 |
53 |
+ 20 |
32 |
+ 30 |
38 |
+ 30 |
58 |
+ 30 |
34 |
+ 40 |
42 |
+ 40 |
62 |
+ 40 |
37 |
+ 50 |
48 |
+ 50 |
66 |
+ 50 |
40 |
Xp = const. - zakres proporcjonalności; pp = const. - punkt pracy regulatora
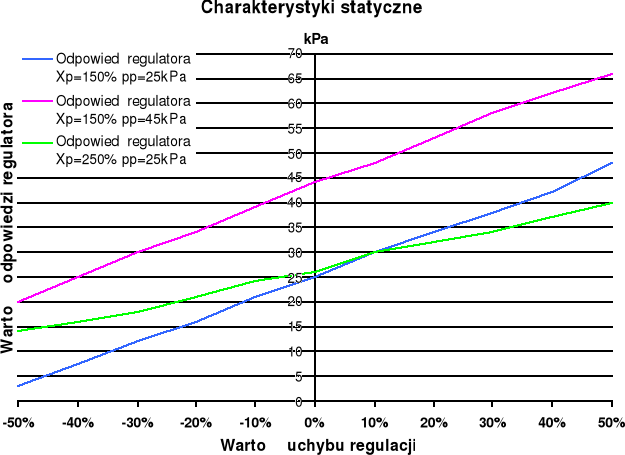
Rzeczywisty zakres proporcjonalności odpowiedzi regulatora wyznaczamy z wykresu powyżej, poprzez odczytanie z niego współczynnika wzmocnienia w następujący sposób:
- dla ![]()
![]()
![]()
- dla ![]()
![]()
![]()
- dla ![]()
![]()
![]()
2. Regulator proporcjonalno-całkujący - typu PI.
Porównanie zadanego czasu zdwojenia Ti z czasem zdwojenia, odczytanym z wykresów rejestratora, przy prędkości przesuwu taśmy wynoszącej 1mm/s.
Wartość zadana |
Zakres proporcjonalności |
Xp = 200 % |
Xp = 200 % |
Xp = 150 % |
Xp = 150 % |
|
Czas zdwojenia |
Ti = 1 min |
Ti = 0,75 min |
Ti = 0,5 min |
Ti = 0,2 min |
Wartość odczytana |
Zakres proporcjonalności |
Xp = 300 % |
Xp = 171,8 % |
Xp = 77 % |
Xp = 42,3 % |
|
Czas zdwojenia |
Ti = 1,8 min |
Ti = 0,92 min |
Ti = 0,67 min |
Ti = 0,37 min |
Regulator typu PI
Wartości zadane: |
|
Zakres proporcjonalności ⇒ Xp = 200 % Czas zdwojenia ⇒ Ti = 1 min |
Zakres proporcjonalności ⇒ Xp = 200 % Czas zdwojenia ⇒ Ti = 0,75 min |
|
|
Wartości odczytane z wykresu: |
|
Zakres proporcjonalności ⇒ Xp = 300 % Czas zdwojenia ⇒ Ti = 1,8 min |
Zakres proporcjonalności ⇒ Xp = 171,8 % Czas zdwojenia ⇒ Ti = 0,92 min |
Regulator typu PI
Wartości zadane: |
|
Zakres proporcjonalności ⇒ Xp = 150 % Czas zdwojenia ⇒ Ti = 0,5 min |
Zakres proporcjonalności ⇒ Xp = 150 % Czas zdwojenia ⇒ Ti = 0,2 min |
|
|
Wartości odczytane z wykresu: |
|
Zakres proporcjonalności ⇒ Xp = 77 % Czas zdwojenia ⇒ Ti = 0,67 min |
Zakres proporcjonalności ⇒ Xp = 42,3 % Czas zdwojenia ⇒ Ti = 0,37 min |
3. Regulator proporcjonalno-całkująco-różniczkujący - PID.
Porównanie zadanego czasu zdwojenia Ti z czasem zdwojenia, odczytanym z wykresów rejestratora, oraz zadany czas wyprzedzenia Td z czasem wyprzedzenia odczytanym z wykresów rejestratora, przy prędkości przesuwu taśmy wynoszącej 1mm/s.
Wartość zadana |
Zakres proporcjonalności |
Xp = 200 % |
Xp = 200 % |
|
Czas zdwojenia |
Ti = 0,5 min |
Ti = 0,5 min |
|
Czas wyprzedzenia |
Td = 0,06 min |
Td = 0,3 min |
Wartość odczytana |
Zakres proporcjonalności |
Xp = 193 % |
Xp = 209 % |
|
Czas zdwojenia |
Ti = 0,87 min |
Ti = 0,8 min |
|
Czas wyprzedzenia |
Td = 0,03 min |
Td = 0,06 min |
Z wartości odczytanych z wykresów w celu sprawdzenia ograniczenia nastaw, korzystamy z nierówności ![]()
:
- dla ![]()
- dla ![]()
A więc ograniczenia nastaw jest spełnione.
Regulator typu PID
Wartości zadane: |
|
Zakres proporcjonalności ⇒ Xp = 200 % Czas zdwojenia ⇒ Ti = 0,5 min Czas wyprzedzenia ⇒ Td = 0,06 min |
Zakres proporcjonalności ⇒ Xp = 200 % Czas zdwojenia ⇒ Ti = 0,5 min Czas wyprzedzenia ⇒ Td = 0,3 min |
|
|
Wartości odczytane z wykresu: |
|
Zakres proporcjonalności ⇒ Xp = 193 % Czas zdwojenia ⇒ Ti = 0,87 min Czas wyprzedzenia ⇒ Td = 0,03 min |
Zakres proporcjonalności ⇒ Xp = 209 % Czas zdwojenia ⇒ Ti = 0,8 min Czas wyprzedzenia ⇒ Td = 0,06 min |
IV. Wnioski
Z przeprowadzonych pomiarów regulatora typu P wykreśliliśmy charakterystyki statyczne dla trzech różnych nastaw. Z charakterystyk tych można również wyznaczyć zakres liniowości, tzn., w którym miejscu charakterystyka jest linią prostą. Różne zakresy liniowości mogą wynikać z zależności, że dla dużych zakresów proporcjonalności (Xp) i dużych wartości punktów pracy regulatora (pp) zakres liniowości mieści się w granicach -30%÷-10%, a przy zmniejszaniu się Xp i pp może osiągać -20%÷4%. W naszym przypadku dla najmniejszych wartości Xp i pp zakres liniowości regulatora mieścił się w zakresie 9%÷40% wartości uchybu regulacji. Następnie wyznaczyliśmy rzeczywisty zakres proporcjonalności odpowiedzi regulatora z charakterystyk statycznych, poprzez odczytanie współczynnika wzmocnienia. Zakresy proporcjonalności odczytane z wykresu różniły się nieznacznie od wartości zadanych.
Dla regulatora PI zostały wyznaczone charakterystyki skokowe a wartości zadane i otrzymane zostały zestawione w tabeli. Stwierdziliśmy, że im dłuższy czas zdwojenia Ti tym mniejsze rozbieżności w zakresie proporcjonalności Xp.
Podobnie dla regulatora PID w tym przypadku były najmniejsze rozbieżności między zadanymi a otrzymanymi wartościami. Różnice między wartościami zadanymi a otrzymanymi mogą być powodowane przez niedokładne nastawy wartości zadanych oraz przez istnienie pewnej nieczułości przetwornika pomiarowego i bloku porównującego. Ma to związek z ich klasą dokładności. Pewne odchyłki mogą być powodowane przez zjawisko interakcji, czyli współzależności nastaw.
6
9
Schemat układu pomiarowego do badania charakterystyk statycznych i skokowych regulatorów
R - zawór odcinający, S - stabilizator, Z - zadajnik, Rej - rejestrator, M1, M3 - manometry, M7-M8 - manometr podwójny
Wyszukiwarka
Podobne podstrony:
Automatyka i sterowanie, Pneumatyczne przyrządy pomiarowe, Akademia Techniczno - Humanistyczna w Bie
ściąga 80, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Fizyka labolatorium, Wymagania + pomo
2Materiały uzupełniające z OŚ, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Ochrona Środowisk
Ćw.3 Naczynie wirujÄ…ce zd, Akademia Techniczno-Humanistyczna w Bielsku-Białej
wymagania 80, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Fizyka labolatorium, Wymagania + p
1Materiały uzupełniające z OŚ, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Ochrona Środowisk
Ochrona własności intelektualnej, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Ochrona Własno
wymagania 56, Akademia Techniczno-Humanistyczna w Bielsku-Białej, Fizyka labolatorium, Wymagania + p
Automatyka i sterowanie, Regulacja dwupołożeniowa, Akademia Techniczno-Humanistyczna
Automatyka i sterowanie, regulatoryP,PI,PID, Akademia Techniczno-Humanistyczna
spraw z fizy, AKADEMIA TECHNICZNO-HUMANISTYCZNA
Akademia Techniczn2, Akademia Techniczno-Humanistyczna
Akademia Techniczn2, Akademia Techniczno-Humanistyczna
Sprawozdanie Eop, Wojskowa Akademia Techniczna (WAT), Ergonomia i Ochrona Pracy, Labolatorium, Inne
36 nowe, Akademia Techniczno-Humanistyczna
Chemia fiz - spr8, Akademia Techniczno-Humanistyczna w
meteorologia, meteorologia Cw2 moje, Akademia Techniczno-Humanistyczna
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID, SGGW Technika Rolnicza i Leśna, Auto
więcej podobnych podstron