82379
Część 1
14. RAMY PRZESTRZENNE STATYCZNIE NI EW YZNACZ ALNE
4
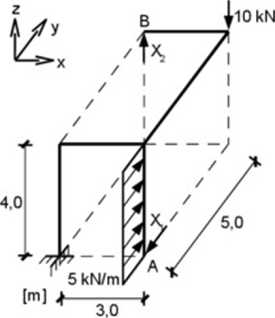
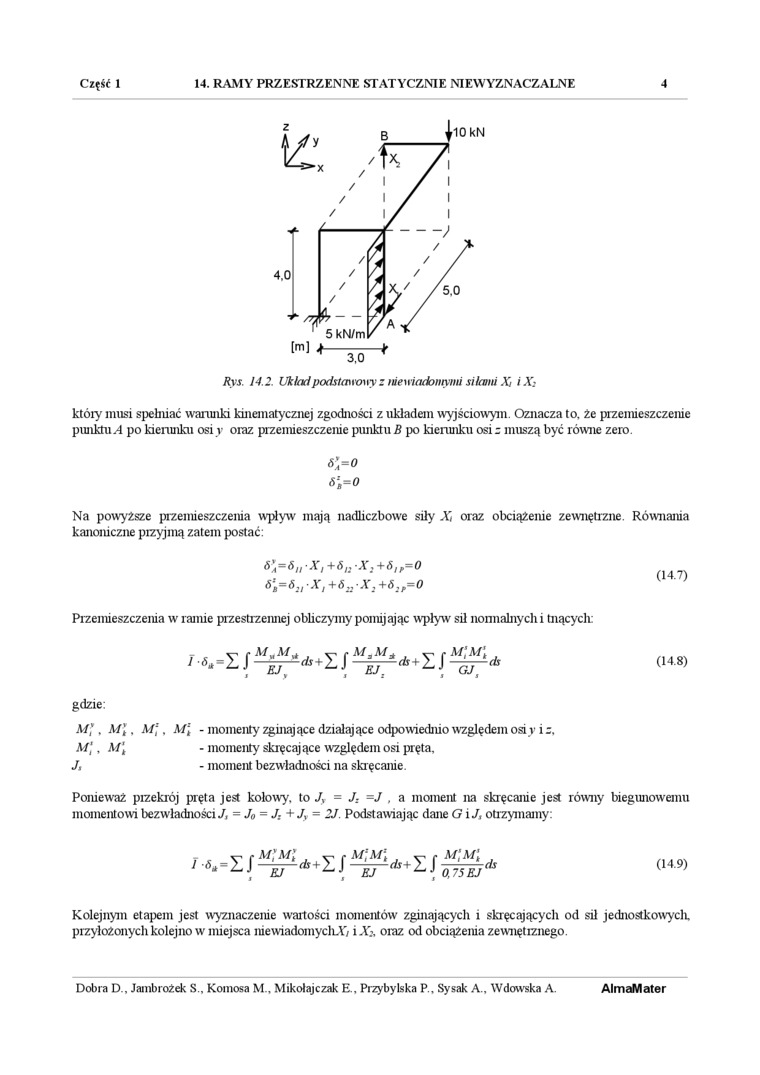
Rys. 14.2. Układ podstawowy z me wiadomymi silami X i X:
który nnisi spełniać warunki kinematycznej zgodności z układem wyjściowym. Oznacza to. że przemieszczenie punktu^ po kierunku osi y oraz przemieszczenie punktu B po kierunku osi _ muszą być równe zero.

Na powyższe przemieszczenia wpływ mają nadliczbowe siły X, oraz obciążenie zewnętrzne. Równania kanoniczne pizyjmą zatem postać:
(14.7)
6’-6„Xl+6oXi+6„-0 6\=6U X, +S2! X: +6:f=0
Przemieszczenia w ramie przestrzeiuiej obliczymy pomijając wpływ sil normalnych i tnących:
M,Mdt j V f M\M\
EJ.
!■
GJ.
-ds
(14.8)
gdzie:
M'. \1\. M]. A/; - momenty zginające działające odpowiednio względem osi v i z.
M] , M\ - momenty skręcające względem osi pręta,
J, - moment bezwładności na skręcanie.
Ponieważ pizekrój pręta jest kołowy, to J} = J: =J . a moment na skręcanie jest równy biegunowemu momentowi bezwładności J, = J0 = J: + /,. = 2J. Podstawiając dane GiJ, otrzymamy:
i* M, A/1 rn (■ iW. iW i ^—• r
EJ
EJ
M,M'k 0,75 EJ
ds
(14.9)
Kolejnym etapem jest wyznaczenie wartości momentów zginających i skręcających od sił jednostkowych przyłożonych kolejno w miejsca niewiadomych^/ i X;, oraz od obciążenia zewnętrznego.
AlmaMater
Dobra D., Jambrożek S.. Komosa M., Mikołajczak E.. Przybylska P.. Sysak A.. Wdowska A.
Wyszukiwarka
Podobne podstrony:
Część 1 14. RAMY PRZESTRZENNE STATYCZNIE NIEWYZNACZALNE 114.14. RAMY PRZESTRZENNE STATYCZNIE
Część 1 14. RAMY PRZESTRZENNE STATYCZNIE NIEWYZNACZALNE 3 gdzie: co - pole powierzchni zawarte
Część 2 4. RAMY OBCIĄŻONE TERMICZNIE. OSIADANIEM PODPÓR ORAZ PRZYPADKI... 19 Rys 4.3S. Układ podstaw
phoca thumb l slajd3 (14) Błona podstawna W ME: blaszka jasna, blaszka gęsta - wytwarzane przez komó
Częsc 1 14 MR=Jfd- y • y • dA = fd Jy2dA A y max y ma { a ponieważ f y2 • dA = I 0
page0275 NEGACYA PRZESTRZENI. 269 powszechną, jakoby wszystko musiało być w przestrzeni. Parmę-ni de
Każde dziecko to potrafi Część 4 (14) ... maty chrząszczy£ Listki koniczyny nadają się doskonale na
AKADEMIA MORSKA w GDYNI WYDZIAŁ MECHANICZNY Ni
zachowania człowieka w społeczeństwie W 4 (1) Zachowania człowieka w społeczeństwie Część IZACHOWANI
tn PICT0097 Część szy Leży w przestrzeni środkowej szyi, rozpoczyna się na wys.
Streszczenie Celem niniejszej pracy było zaprojektowanie ramy przestrzennej do dwumiejscowego pojazd
Część 1 13. BELKI CIĄGLE STATYCZNIE NIEWYZNACZALNE 16 l-i 1 -2-2" /////
Część 1 13. BELKI CIĄGLE STATYCZNIE NIEWYZNACZALNE 5----A A
więcej podobnych podstron