82459
Część 2 10. STATECZNOŚĆ POCZĄTKOWA 7
i zapisujemy równania kanoniczne:
rll(p+rl3A+Rlf=0
r„<P+raA+R„-0
Za sposobu obciążenia możemy odczytać, któiy z prętów jest ściskany. Następnie określamy parametry geometryczne układu.
Tabela 10.2. Zestawienie wielkości charakterystycznych dla poszczególnych prętów
|
pręt |
Al “1 |
EJ, |
vf | |
|
1 |
0 |
5 |
1 |
0 |
|
2 |
p |
4 |
1 |
16P EJ |
|
3 |
2P |
3 |
2 |
9P EJ |
Współczynnik v zależy od wartości siły normalnej w pręcie dla każdego sposobu podparcia jest inny

Dla poszczególnych prętów mamy:
V; =0

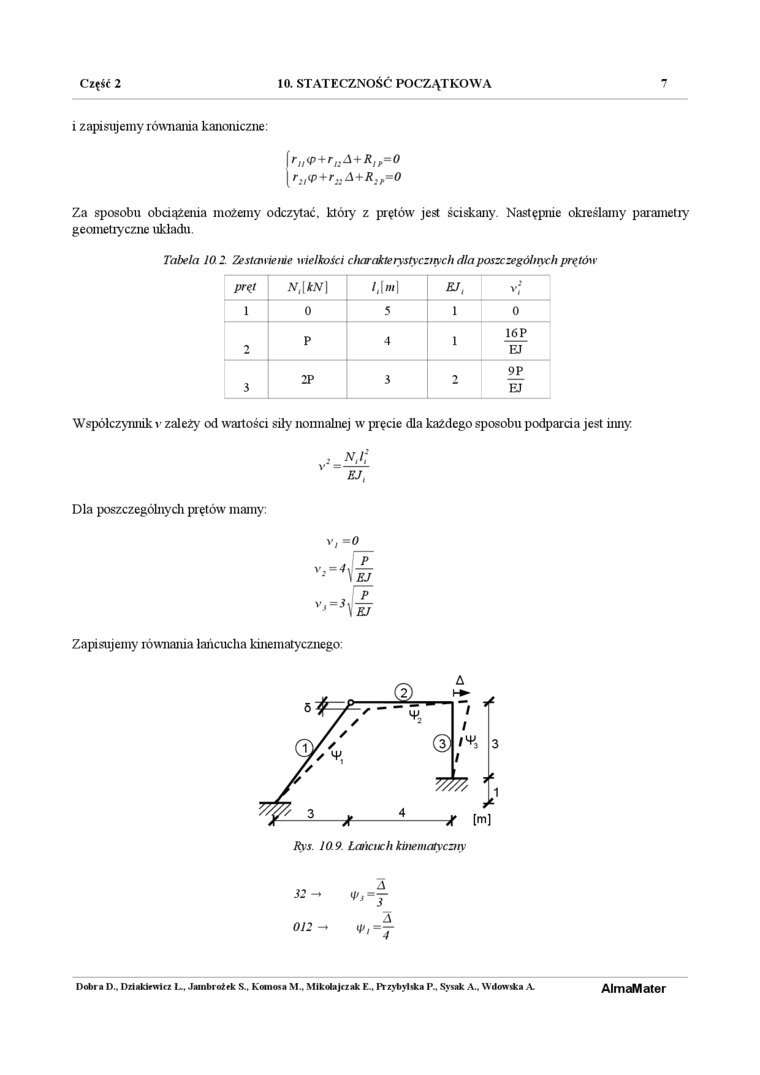
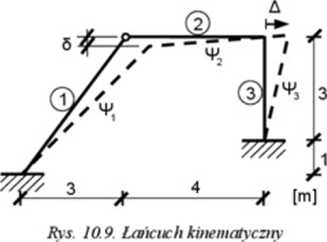
Zapisujemy równania łańcucha kinematycznego:
|
32 - |
li -> 3- |
|
012 - |
^/=r |
Dobra D.. Dziakirwlcz U. Jainbrożrk S.. Koniora M.. Mikołajczak E.. Przybylrka P.. Sytak A.. Wdowska A AlmaMater
Wyszukiwarka
Podobne podstrony:
Część 2 10. STATECZNOŚĆ POCZĄTKOWA 18 10.4. Obciążenie wieloparametrowe Rozpal izmy ramę
Część 2 10. STATECZNOŚĆ POCZĄTKOWA 13 Część 2 10. STATECZNOŚĆ POCZĄTKOWA 13 4 *
Część 2 10. STATECZNOŚĆ POCZĄTKOWA 2 W analizowanej ramie tylko jeden pręt przenosi silę
Część 1 15. ZADANIA POWTÓRKA 10 Aby obliczyć współczynniki równania kanonicznego Sn i Ais tworz
Część 2 16. ZADANIA POWTÓRKA 22 Zapisując równanie równowagi monieniów w węźle 1 otrzymamy
(1.10) (1.11) L + V = 1E2. = = E% =1 Zapisując dla i-tego składnika mieszaniny rów
fizyka005 odpowiedzi 2. Dynamika 2.1. Zasady dynamiki Newtona (część 1) 1. m = —= 10 kg 2.
Pict0045 (10) Odmiana I Początek zabawy jak poprzednio, ale w czasie, gdy dzieci biegają, nauczyciel
skanowanie0054 (11) Ich udział w przewozach ogólnopolskich wynosił około 10°/o. Na początku 1939 r.
skanuj2 10 - ...=6 (w każdym z tych przypadków równanie jest warunkiem na szukaną) • &nb
Każde dziecko to potrafi Część 4 (10) [instrumenty muzyczne Nie tylko z pustych pudełek po herbacie
www.matemaks.pl Matura podstawowa - kurs - część 10 z 62 - wzory skróconego mnożenia Uczeń używa wzo
Projekt MES Comsol Multiphysics 3.4 Rys. 10 Warunki początkowe - utwierdzenie modelu. Rys. 11 Warunk
więcej podobnych podstron