91101
G(s) liniowym układu (Obiektu) liniowego stacjonarnego nazywać będziemy wartość określoną jako stosunek transformaty wymuszenia U(s) tego układu przy zerowych warunkach początkowych. G(s) =Y(s) / U(s)
TYPOWE CZŁONY LINIOWE
- Człon proporcjonalny
- Człon inercyjny I rzędu
- Człon całkujący idealny( na YVY jest całka)
- Człon całkujący z inercją! to samo, tylko zaburzone)
- Człon różniczkujący( na WY pochodna sygnału WE)
- Człon różniczkujący z inercją! to samo ale zaburzony)
- Człon oscylacyjny( złożenie członów inercyjnych inercyjnych rzędu)
- Człon oscylacyjny II rzędu
- Człon opóźniający( to co na WE opóźnione na WY)
CZŁON BEZINERCYJNY ( proporcjonalny wzmacniający)
Równanie różniczkowe WE/W Y: y= ku
k - współczynnik wzmocnienia określony jako stosunek odpowiedzi y do wymuszenia w stanie ustalonym.
T - stała czasowa = 0
Charakterystyka skokowa: g(t)
t
h(t) = kl(t)
Charakterystyka impulsowa: h(t)
h(t) = k ó(t)
Transmitacja:

Gi(s) = k
Kierunek przepływu pi^tn
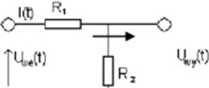
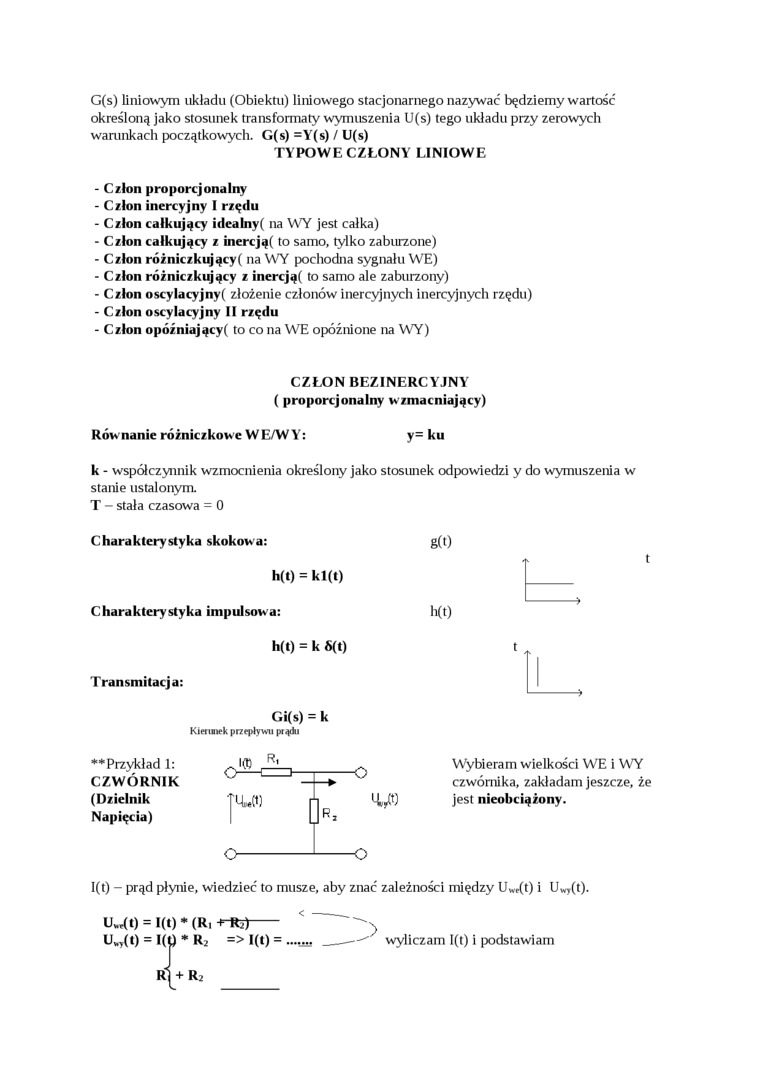
** Przykład 1: CZWÓRNIK (Dzielnik Napięcia)
Wybieram wielkości WE i WY czwómika, zakładam jeszcze, że jest nieobciążony.
o
O
I(t) - prąd płynie, wiedzieć to musze, aby znać zależności między Uw«(t) i Uwy(t).
iMt) = i(t) - (R, -ma—
lUt) = 1(0 * r2 => I(t) wyliczam l(t) i podstawiam
R
+ R a
Wyszukiwarka
Podobne podstrony:
12597021?1428299964465w6151290 o 10. Warunkiem koniecznym i wystarczającym stabilności liniowego, st
Jest to możliwe, jeśli obiekt jest liniowy, stacjonarny i skończenie wymiarowy, tzn. jest opisany ró
Zdjęcie 0084 1. Macierz kwadratową i 11 (operator liniowy w Rk) nazywamy projektor
img082 82 6. Metody aproksymacyjne Rys. 6.8. Dychotomie liniowe dla m = 2 oraz N = 4 Tabela 6.1. War
2 Test oparty na regresji liniowej W modelu regresji liniowej posługiwać się będziemy zestawem danyc
CCF20110506�016 2 2 (7—113) Prąd i2 maleje liniowo od wartości określonej wzorem (7—110) zgodnie z w
34. W klasycznym modelu regresji liniowej y, = a + bx, + u,, jeżeli zmienność wartości pozostał
Współczynnik liniowy Pearsona przyjmuje zawsze wartości z przedziału od -1 do +1. Dodatni znak współ
Bitii , a /i / 3. Analizowano model liniowy opisujący zależność pomiędzy wartością
więcej podobnych podstron