91941
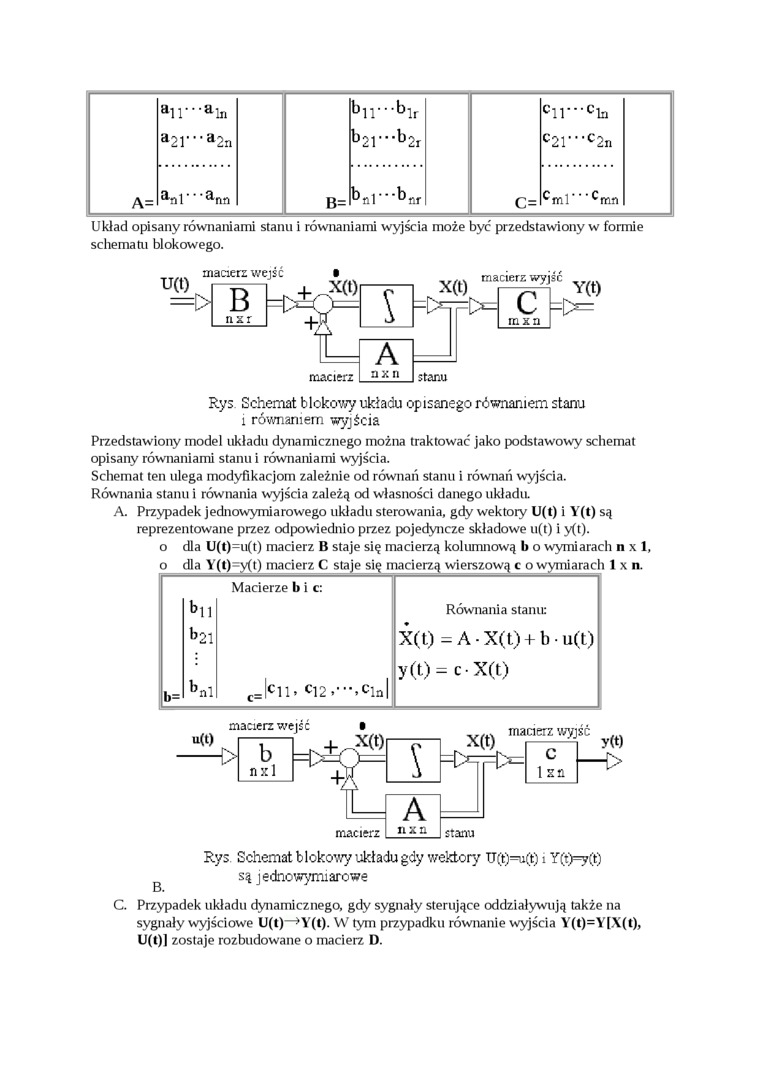
Układ opisany równaniami stanu i równaniami wyjścia może być przedstawiony w formie schematu blokowego.
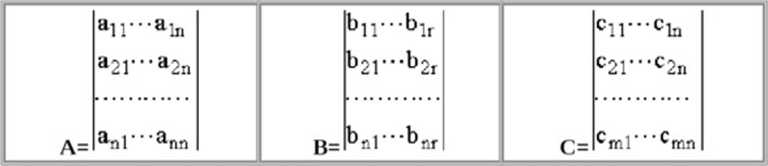
Rys Schemat blokowy układu opisanego równaniem stanu i równaniem wyjścia
Przedstawiony model układu dynamicznego można traktować jako podstawowy schemat opisany równaniami stanu i równaniami wyjścia.
Schemat ten ulega modyfikacjom zależnie od równań stanu i równań wyjścia.
Równania stanu i równania wyjścia zależą od własności danego układa
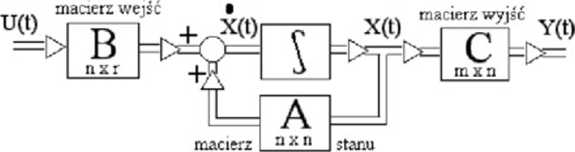
A. Przypadek jednowymiarowego układu sterowania, gdy wektory U(t) i Y(t) są reprezentowane przez odpowiednio przez pojedyncze składowe u(t) i y(t).
o dla U(t)=u(t) macierz B staje się macierzą kolumnową b o wymiarach nxl,
|
Macierze b i c: | |||
|
bil |
Równania stanu: | ||
|
b21 |
X(t) = A ■ X(t) + b • u(t) | ||
|
b= |
bnl |
C=|c11» c12»'"»cln| |
>< u II ;>» |
o^da^ęO^^O^^derz^C^steje^inwdera^^erezo^c^ow^raaracłi 1 x n.
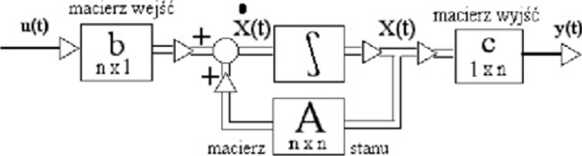
Rys Schemat blokowy układu gdy wektory TJ(t)=u(t) i Y(t)=y(t) są jednowymiarowe
C. Przypadek układu dynamicznego, gdy sygnały sterujące oddziaływują także na sygnały wyjściowe U(t)-^Yft). W tym przypadku równanie wyjścia Y(t)=Y[X(t), U(t)l zostaje rozbudowane o macierz D.
Wyszukiwarka
Podobne podstrony:
img091 91 Rozdział 7. Sieć Hopfielda może być przedstawiona w formie klasycznej sigmoidy rfn = <P
skanuj0007 (79) Z lego zapisu wynika, że informacja geograficzna może być przedstawiona w formie opi
74633 skanuj0007 (79) Z lego zapisu wynika, że informacja geograficzna może być przedstawiona w form
d) zatytułowane 9. Treść zasadnicza protokołu może być przedstawiona w formie: a)
74633 skanuj0007 (79) Z lego zapisu wynika, że informacja geograficzna może być przedstawiona w form
Sieci CP str091 91 Rozdział 7. Sieć Hopfielda może być przedstawiona w formie klasycznej sigmoidy l+
Układ równań liniowych może być: 1) sprzeczny, gdy zbiór rozwiązań układu jest
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
W układzie przedstawionym na rysunku wartość napięcia wyjściowego może być regulowana od 1.25V do ok
uJ T=l/f J Rys. 6. Sygnał impulsowy na wyjściu przetw omika Jako wielkość wyjściową może być przyjęt
img147 (9) Elementarne wprowadzenie do techniki sieci neuronowych 141 o wielu wyjściach może być wię
Ponieważ naprężenie normalne o> dla warunków jak na rys. la może być przedstawione za pomocą wzor
Podstawowe twierdzenie arytmetyki: Każda liczba całkowita n > 2 może być przedstawiona jako ilocz
więcej podobnych podstron