9402139776
r: Artur Gmerek
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut Automatyki,;
współrzędnych. Układ współrzędnych związany z efektorem zależy od geometrii chwytaka, ale jeżeli jest to możliwe, to dla uproszczenia rozważań, można przyjąć taką samą orientację tego układu, jak układu przedostatniego.
Następnym krokiem jest wyznaczanie zmiennych i parametrów złączowych, w oparciu o przytoczone definicje. Dla przykładu zostało to wykonane dla układu współrzędnych 1 względem 0:
a - jest to kąt mierzony wokół osi 1x od °z do xz, zgodnie z zasadą śruby prawoskrętnej (kąt ma dodatnią wartość, gdy obrót jest zgodny z ruchem wskazówek zegara).Gdybyśmy przedłużyli w myślach oś °z, do tego stopnia, żeby przecięła się z układem współrzędnych oznaczonym numerem 1 i zrzutowali osie na płaszczyznę zy pierwszego układu otrzymalibyśmy obraz:
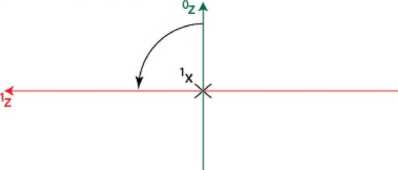
Ważne jest, żeby wyobrażając sobie ten rzut, patrzeć w stronę, w którą podąża grot strzałki (strona wzrastających wartości) (strzałka jest skierowana za monitor). W przeciwnym razie otrzymamy wyniki, jak dla lewoskrętnego układu współrzędnych i nie będą one zgadzać się z rysunkiem. Ze schematu widzimy, iż kąt pomiędzy osią °z, a osią xz, zgodnie z zasadą śruby prawoskrętnej wynosi — - (oś poprzednią należy obrócić w stronę przeciwną do ruchu wskazówek zegara o 90 deg, aby pokryła się ona z osią następną).
a - jest odległością, dla pierwszego złącza, mierzoną wzdłuż osi xx od °z do xz Rzutując w myślach potrzebne do wyznaczenia odległości osie na płaszczyznę xy układu współrzędnych z indeksem 1, otrzymamy rysunek:

2
Wyszukiwarka
Podobne podstrony:
r: Artur Gmerek Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut Automatyki, autor:
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut Automatyki, autor:
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki. Politechnika Łódzka. Instytut Automatyki, autor:
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut Automatyki, autor:
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut Automatyki, autor:
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut Automatyki, autor:
Materiały pomocnicze do ćwiczeń z Podstaw Robotyki, Politechnika Łódzka, Instytut Automatyki, autor:
MATLABMateriały pomocnicze do ćwiczeń z Podstaw Informatyki Wydział Inżynierii Mechanicznej i Roboty
IMG@39 13 MATERIAŁY POMOCNICZE DO ĆWICZENIA „BADANIA MAKROSKOPOWE” Tab. 14. Określenie rodzajów grun
Materiały pomocnicze do ćwiczenia laboratoryjnego z korekcji kół zębatych (uzębienia i zazębienia) 1
Część III: Termodynamika układów biologicznych Materiały Pomocnicze do Wykładów z Podstaw
3 3 Wydział Transportu PW Laboratorium z informatyki sem.II. ćw. 3 Materiały pomocnicze do ćwiczenia
Zaawansowana rachunkowość zarządcza - materiały pomocnicze do ćwiczeń strona 1 dr
więcej podobnych podstron