9990200032
2. Podstawy teoretyczne
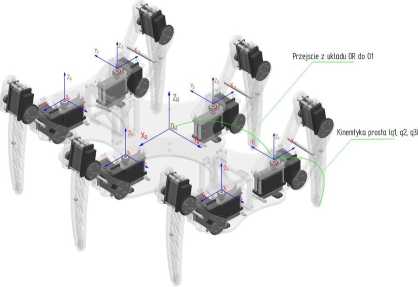
Rysunek 2.1 Rozmieszenie lokalnych układów współrzędnych, dla każdej z nóg
po obliczeniu uzyskuje się następujące macierze transformacji:
|
-1 |
0 |
0 |
-w | |
|
0 |
-1 |
0 |
h | |
|
0 |
0 |
1 |
0 | |
|
. 0 |
0 |
0 |
1 . | |
|
1 |
0 |
0 |
w | |
|
0 |
1 |
0 |
k | |
|
0 |
0 |
1 |
0 | |
|
p |
0 |
0 |
1. | |
gdzie Zi i l2 oznaczają pozycję lokalnego układu współrzędnych nogi względem układu Or. Wartości te można odczytać z rysunku 2.2. Na przykład dla nogi pierwszej (z — 1), h — au h — 0,3, natomiast dla i — 4, li = 01, l2 — 03.
Do wyznaczenia kinematyki pojedynczej nogi (rysunek 2.3) posłużono się algorytmem Denavita-Hartenberga [18]. Przejście do kolejnych układów współrzędnych związanych z przegubami qi, q2, <73 wygląda następująco:
?T = Rot (Z, qi),
2T = Rot ^ Trans (X, d\) Rot (Z, q2),
\T — Trans (X, d2) Rot (Z, 93),
\T = Trans {X, d3).
Wyszukiwarka
Podobne podstrony:
2. Podstawy teoretyczne Rysunek 2.2 Poglądowe wymiary robota Rysunek 2.3 Kinematyka nogi Po obliczen
Projekt NUMPRESS, Zad. 2: Program NUMPRESS-Explicit: podstawy teoretyczne Rysunek 3: Zależność siły
Projekt NUMPRESS, Zad. 2: Program NUMPRESS-Explicit: podstawy teoretyczne k Rysunek 4: Grupa sąsiadu
Projekt NUMPRESS, Zad. 2: Program NUMPRESS-Explicit: podstawy teoretyczne Rysunek 1: Typowy model gł
skanuj0029 (84) J #6: Skale Lokryckie - dla akordów półzmniejszonych; cztery takty dla każdej skali
Manipulator RIMP 401 Rys.5. Rozmieszczenie układów współrzędnych (Xo, Yg - globalny; Xb, Yb - podsta
img166 Podstawy teoretyczne do ćwiczeń laboratoryjnych KRYSTALIZACJA dla kierunku Biotechnologi
Realizacja projektu - badania podstawowe Przykłady testowanych układów modelowych dla reaktora NTP
Semestr IX Synteza układów automatyzacji maszyn: podstawy teoretyczne, przykłady syntezy układów
42779 skan0169 332 H. BUCHOWSKI Rysunek 8 przedstawia wykres zależności (10) dla trzech układów: ż-b
Slajd7 (15) LIDER - PODSTAWY TEORETYCZNE F.Hunter (1953) - „rządzi biznes” - władze lokalne są pod p
WYTYCZNE TECHNICZNE G-1.10 Formuły odwzorowawcze układów współrzędnych G-2.1 Podstawowa osnowa
321 2 Równania różniczkowe 8.1. Podstawy teoretyczne 8.1.1, Zagadnienia początkowe dla równań
więcej podobnych podstron