9990200033
2. Podstawy teoretyczne
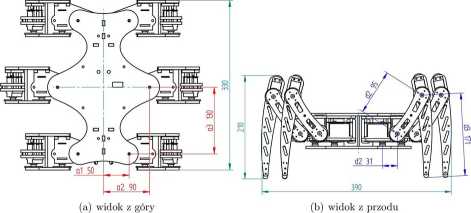
Rysunek 2.2 Poglądowe wymiary robota
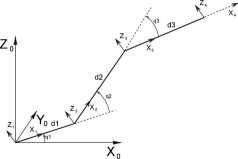
Rysunek 2.3 Kinematyka nogi
Po obliczeniu wektor translacji ma postać:
{x = ci (c23d3 + c2d2 + di)
y = Si (c23d3 + c2d2 + di) . (2-2)
Z = S23^3 + s2d2
2.3 Odwrotne zadanie kinematyki nogi robota.
Do rozwiązania zadania odwrotnego kinematyki zastosowano metodę algebraiczną.
Wprowadzone są następujące ograniczenia: postura nogi typu "noga owada" (zawsze zgięta w kolanie), kąt qi € (—f’ f) — przekroczenie tego zakresu oznaczało by kolizję nogi z korpusem.
Dzieląc y przez x, z zależności 2.2 uzyskuje się
qx = atan2(y,:r). (2.3)
Rysunek 2.4 przedstawia rzuty nogi na płaszczyznę OXY i OXY. Z twierdzenia Pitagorasa można określić długość nogi na płaszczyźnie OXY:
\/x2 + y2.
Wyszukiwarka
Podobne podstrony:
2. Podstawy teoretyczne Rysunek 2.1 Rozmieszenie lokalnych układów współrzędnych, dla każdej z nóg p
Projekt NUMPRESS, Zad. 2: Program NUMPRESS-Explicit: podstawy teoretyczne Rysunek 3: Zależność siły
Projekt NUMPRESS, Zad. 2: Program NUMPRESS-Explicit: podstawy teoretyczne k Rysunek 4: Grupa sąsiadu
Projekt NUMPRESS, Zad. 2: Program NUMPRESS-Explicit: podstawy teoretyczne Rysunek 1: Typowy model gł
2. Podstawy teoretyczne 11 • offsety — przemieszczenie robota wzdłuż osi OY w trak
2. Podstawy teoretyczne (a) rzut na płaszczyznę OXY Rysunek 2.4 Kinematyka odwrotna nogi Można więc
DSC03706 Struktury MACIERZOWA (3) Rysunek 14.14 Spektrum struktur Na podstawie teoretycznej koncepcj
2. Podstawy teoretyczne 13 Algorytm wymaga, aby nogi wstępnie ustawione były w pozycję neutralną (ry
Foto2916 78 Rozdział 1 Zarządzanie kryzysowe w samorządach - podstawy teoretyczne 79 Rysunek 16. Pro
Foto2918 82 Rozdział 1 Zarządzanie kryzysowe w samorządach - podstawy teoretyczne 83 Rysunek 18. Baz
Obraz (1444) 16 Podstawy teoretyczno-metodyczni* analizy ckonomic/ncj Rysunek 1.1 Klasyfikacja anali
284 Rys. 7.48. Wymiarowanie od podstaw konstrukcyjnych: a) rysunek złożeniowy konstrukcji, b) wymiar
skanuj0007 (481) Rozdział 1. ♦ Podstawy 17 Rozdział 1. ♦ Podstawy 17 Rysunek 1.3. Konfiguracja serwe
P1010281 (6) 20 Ogólne podstawy fotogrametrii Ogólne podstawy fotogrametrii RYSUNEK 17. Widzenie bin
Egzamin Podstawy automatyki 8 Politechnika Poznańska PP 1^ G, *0-Q#
Tematyka zajęć Podstawy projektowania Rysunek techniczny Inżynier, projektant,
więcej podobnych podstron