3570947866
Manipulator RIMP 401
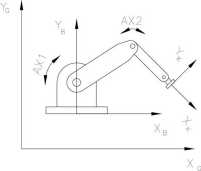
Rys.5. Rozmieszczenie układów współrzędnych (Xo, Yg - globalny; Xb, Yb - podstawowy; Xk, Yk -kodowy; AX1 iAX2 - maszynowy)
2.10. Czujniki i sensory:
- Nadzorujące pracą robota, wstrzymujące jego działanie, jeżeli może to doprowadzić do zagrożenia;
- Odczytujące statyczne parametry pracy (położenia programowe w programie sterującym), korygujące dynamicznie parametry pracy (prędkość i tor ruchu).
3. Przeznaczenie i wyposażenie manipulatora RIMP 410 - WPD (wersja przejezdna dwuramienna)
3.1. Przeznaczenie manipulatora typu RIMP.
Manipulator RIMP przeznaczony jest do zastąpienia pracy ludzkiej przy obsłudze maszyn wymagającej precyzji ruchów lub odbywającej się w warunkach zagrażających zdrowiu pracownika. Zastępuje również człowieka przy wykonywaniu prostych, monotonnych, powtarzających się czynności.
Ponieważ może pracować w sposób ciągły i równomierny w stałym cyklu automatycznym daje możliwość zwiększenia produkcji. Głównym zastosowaniem manipulatora jest obsługa pras formujących wyroby z metalu lub tworzyw sztucznych, młotów kuźniczych, maszyn do odlewów ciśnieniowych itp. w gniazdach technologicznych lub liniach automatycznych według określonego procesu.
Manipulator ten produkowany był w czterech wersjach:
- RIMP 401 - TP - wersja podstawowa,
- RIMP 401 - WD - wersja dwuramienna,
- RIMP 401 - WPJ - wersja przejezdna jednoramienna,
- RIMP 401 - WPJ - wersja przejezdna dwuramienna (znajduje się na laboratorium).
5
Wyszukiwarka
Podobne podstrony:
Manipulator RIMP 401 Rys.7. Widok manipulatora 3.5. Schemat Do manipulatora doprowadzone jest sprężo
Manipulator RIMP 401 Rys.9. Schemat budowy zespołu ramienia 3.6. Sterowanie Układ sterowania manipul
Manipulator RIMP 401 Rys.l 1. Widok pulpitu manipulacyjno-kontrolnego głównego 3.7.2. Pulpit
Manipulator RIMP 401 Rys. 13. Widok tablicy programowej 4. Uruchomienie robota W celu uruchomienia r
Manipulator RIMP 401 Rys.2. Przykładowy schemat sterowania numerycznego Interpolacja - sposób ruchów
Manipulator RIMP 401 - wysuwanie i cofanie tłoczyska, - obrót
Manipulator RIMP 401 3.6.1. Sygnały wejściowe Sygnały wejściowe powodują (mogą
Manipulator RIMP 401 3.7. Pulpit sterowniczy 3.7.1. Pulpit manipulacyjno-kontrolny główny Służy do:
Manipulator RIMP 401 Ideo gram robota - diody odpowiadają pozycjom poszczególnych ruchów (kolor czer
Manipulator RIMP 401 różne wyłączniki krańcowe, przełączniki drogowe, itp. podłączone do układu
Manipulator RIMP 401 1. Cel ćwiczenia Celem ćwiczenia jest zapoznawanie z budową i
Manipulator RIMP 401 Tabl.5.1 Rodzaj ruchu Skok ramienia 400 mm 600 mm Obrót ramienia
Manipulator RIMP 401 - Rodzaj sterowania; - Wyposażenie dodatkow
Manipulator RIMP 401 - Ciągłe (CP - Continous Path) - sterowanie z poziomu programu sterującego zaró
Manipulator RIMP 401 C 3.2. Wyposażenie manipulatora Wyposażenie normalne typu podstawowego
Manipulator RIMP 401 Wyposażenie specjalne obejmujące: - ramię (dodatkowe) z
Manipulator RIMP 401 3.3.4. Zakres działania - Skok silnika ramienia 60-400 (600)
2. Podstawy teoretyczne Rysunek 2.1 Rozmieszenie lokalnych układów współrzędnych, dla każdej z nóg p
Image 07 WYKAZ RYSUNKÓW Rys. 1: Rozmieszczenie przycisków i pokręteł manipulacyjnych na płycie czoło
więcej podobnych podstron