3570947862
Manipulator RIMP 401
Tabl.5.1
|
Rodzaj ruchu |
Skok ramienia | |
|
400 mm |
600 mm | |
|
Obrót ramienia (kierunek) |
1.0 s |
1.0 s |
|
Wysuwanie ramienia (BN) |
0.8 s. |
1.0 s |
|
Cofanie ramienia (BW) |
0.9 s |
1.2 s |
|
Obrót chwytaka (C) |
0.2 s | |
|
Zamykanie chwytaka (DN) |
0.2 s | |
|
Luzowanie chwytaka (DW) |
0.3 s | |
|
Podnoszenie ramienia (EN) |
0.5 s | |
|
Opuszczanie ranienia (EW) |
0.6 s | |
6. Przykład zaprogramowania manipulatora RIMP 401 do współpracy z prasą
W przykładzie zastosowano robot RIMP 401 do obsługi pras ciernej/ wyposażonej w przyrząd do samoczynnego usuwania detalu r zewnątrz i załadowywanie detalu przy użyciu automatycznego podajnika i manipulatora. Schemat stanowiska przedstawiony jest r rys.4.1.
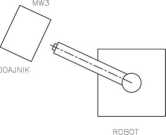
T 2
PRASA .
ROBOT
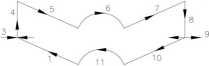
Rys.15. Schemat stanowiska technologicznego obsługiwanego przez manipulatora RIMP 401 i diagram pracy
Na stanowisku tym zastosowano następujące mikrowyłącznik kontrolne: MW 1 - kontrola górnego położenia prasy,
MW2 - kontrola usunięcia przedmiotu z prasy,
MW3 - kontrola prawidłowego umieszczenia półfabrykatu,
MW4 - kontrola zaciśnięcia szczęk chwytaka,
MW5 - kontrola wsuwu ramienia.
MW6, MW7 - kontrola pozycjonowania ramienia.
Kolejne czynności i ruchy przedstawiono w tabi.6.2
19
Wyszukiwarka
Podobne podstrony:
Manipulator RIMP 401 Rys.9. Schemat budowy zespołu ramienia 3.6. Sterowanie Układ sterowania manipul
Manipulator RIMP 401 3.3.4. Zakres działania - Skok silnika ramienia 60-400 (600)
Manipulator RIMP 401 - Rodzaj sterowania; - Wyposażenie dodatkow
Manipulator RIMP 401 Rys.7. Widok manipulatora 3.5. Schemat Do manipulatora doprowadzone jest sprężo
Manipulator RIMP 401 - wysuwanie i cofanie tłoczyska, - obrót
Manipulator RIMP 401 3.6.1. Sygnały wejściowe Sygnały wejściowe powodują (mogą
Manipulator RIMP 401 3.7. Pulpit sterowniczy 3.7.1. Pulpit manipulacyjno-kontrolny główny Służy do:
Manipulator RIMP 401 Rys.l 1. Widok pulpitu manipulacyjno-kontrolnego głównego 3.7.2. Pulpit
Manipulator RIMP 401 Ideo gram robota - diody odpowiadają pozycjom poszczególnych ruchów (kolor czer
Manipulator RIMP 401 Rys. 13. Widok tablicy programowej 4. Uruchomienie robota W celu uruchomienia r
Manipulator RIMP 401 różne wyłączniki krańcowe, przełączniki drogowe, itp. podłączone do układu
Manipulator RIMP 401 1. Cel ćwiczenia Celem ćwiczenia jest zapoznawanie z budową i
Manipulator RIMP 401 Rys.2. Przykładowy schemat sterowania numerycznego Interpolacja - sposób ruchów
Manipulator RIMP 401 - Ciągłe (CP - Continous Path) - sterowanie z poziomu programu sterującego zaró
Manipulator RIMP 401 Rys.5. Rozmieszczenie układów współrzędnych (Xo, Yg - globalny; Xb, Yb - podsta
Manipulator RIMP 401 C 3.2. Wyposażenie manipulatora Wyposażenie normalne typu podstawowego
Manipulator RIMP 401 Wyposażenie specjalne obejmujące: - ramię (dodatkowe) z
gera 3. Migracje i ich wpływ na rozmieszczenie ludności ®1. Uzupełnij zdania, dopisując właściwy rod
page0440 XXIV. skarbowoić 401 TABL. 44. WYDATKI ZWIĄZKÓW SAMORZĄDU TERYTORIALNEGO Na podstawie preli
więcej podobnych podstron