3570947860
Manipulator RIMP 401
różne wyłączniki krańcowe, przełączniki drogowe, itp. podłączone do układu sterowania.
- ostatni wiersz (KC) służy do określenia końca cyklu, czyli kroku który ma być ostatnim krokiem programu; praktycznie oznacza to po wykonaniu wszystkich czynności w danym kroku przejście do początku programu i inicjację kolejnego cyklu. Nieumieszczenie w tym wierszu żadnego wtyku powoduje przejście do początku programu po przetaktowania całej tablicy, tj. po wykonaniu kroku w 35 kolumnie. Przed zaprogramowaniem końca cyklu należy pamiętać o sprawdzeniu czy wszystkie ruchy zostały sprowadzone do położenia początkowego.
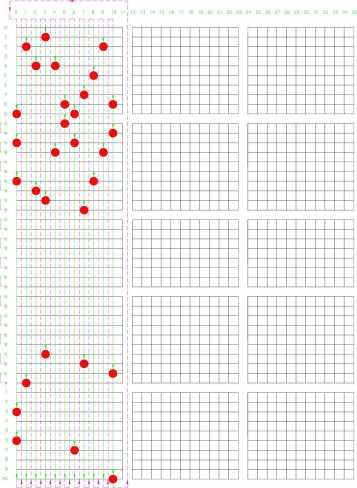
Rys. 14. Schemat tablicy programowej z umieszczonymi wtykami (strzałkami oznaczono kierunek przeszukiwania w tablicy dla przykładu)
Wyszukiwarka
Podobne podstrony:
Manipulator RIMP 401 Rys.7. Widok manipulatora 3.5. Schemat Do manipulatora doprowadzone jest sprężo
Manipulator RIMP 401 - wysuwanie i cofanie tłoczyska, - obrót
Manipulator RIMP 401 Rys.9. Schemat budowy zespołu ramienia 3.6. Sterowanie Układ sterowania manipul
Manipulator RIMP 401 3.6.1. Sygnały wejściowe Sygnały wejściowe powodują (mogą
Manipulator RIMP 401 3.7. Pulpit sterowniczy 3.7.1. Pulpit manipulacyjno-kontrolny główny Służy do:
Manipulator RIMP 401 Rys.l 1. Widok pulpitu manipulacyjno-kontrolnego głównego 3.7.2. Pulpit
Manipulator RIMP 401 Ideo gram robota - diody odpowiadają pozycjom poszczególnych ruchów (kolor czer
Manipulator RIMP 401 Rys. 13. Widok tablicy programowej 4. Uruchomienie robota W celu uruchomienia r
Manipulator RIMP 401 1. Cel ćwiczenia Celem ćwiczenia jest zapoznawanie z budową i
Manipulator RIMP 401 Tabl.5.1 Rodzaj ruchu Skok ramienia 400 mm 600 mm Obrót ramienia
Manipulator RIMP 401 - Rodzaj sterowania; - Wyposażenie dodatkow
Manipulator RIMP 401 Rys.2. Przykładowy schemat sterowania numerycznego Interpolacja - sposób ruchów
Manipulator RIMP 401 - Ciągłe (CP - Continous Path) - sterowanie z poziomu programu sterującego zaró
Manipulator RIMP 401 Rys.5. Rozmieszczenie układów współrzędnych (Xo, Yg - globalny; Xb, Yb - podsta
Manipulator RIMP 401 C 3.2. Wyposażenie manipulatora Wyposażenie normalne typu podstawowego
Manipulator RIMP 401 Wyposażenie specjalne obejmujące: - ramię (dodatkowe) z
Manipulator RIMP 401 3.3.4. Zakres działania - Skok silnika ramienia 60-400 (600)
K 454d Input Signals - ustawianie reakcji na wyłączniki krańcowe i Linę 6 luzowanie silników podczas
Lista przyporządkowania Nazwa cisk Si cn 04 Przycisk S3 Wyłącznik I krańcowy S*
więcej podobnych podstron