3570947867
Manipulator RIMP 401
C
3.2. Wyposażenie manipulatora
Wyposażenie normalne typu podstawowego manipulatora obejmuje:
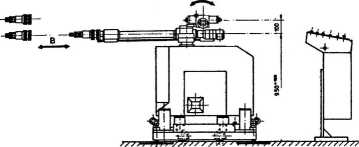
- ramię z wysuwanym tłoczyskiem o skoku 400 lub 600 mm i mechanizmem obrotu chwytaka,
- uchwyt pojedynczy ramienia,
- chwytak dźwigniowy umożliwiający przykręcenie, odpowiednich dla potrzeb użytkownika, szczęk,
- wózek unoszący, umożliwiający manewrowanie manipulatorem w miejscu zainstalowania(dla manipulatora bez podwozia),
- wąż zasilający manipulator sprężonym powietrzem dł. 5 m,
- przewód łączący szafę sterowniczą z manipulatorem,
- zestaw narzędzi.
6
Wyszukiwarka
Podobne podstrony:
Manipulator RIMP 401 Wyposażenie specjalne obejmujące: - ramię (dodatkowe) z
Manipulator RIMP 401 - Rodzaj sterowania; - Wyposażenie dodatkow
Manipulator RIMP 401 Rys.7. Widok manipulatora 3.5. Schemat Do manipulatora doprowadzone jest sprężo
Manipulator RIMP 401 - wysuwanie i cofanie tłoczyska, - obrót
Manipulator RIMP 401 Rys.9. Schemat budowy zespołu ramienia 3.6. Sterowanie Układ sterowania manipul
Manipulator RIMP 401 3.6.1. Sygnały wejściowe Sygnały wejściowe powodują (mogą
Manipulator RIMP 401 3.7. Pulpit sterowniczy 3.7.1. Pulpit manipulacyjno-kontrolny główny Służy do:
Manipulator RIMP 401 Rys.l 1. Widok pulpitu manipulacyjno-kontrolnego głównego 3.7.2. Pulpit
Manipulator RIMP 401 Ideo gram robota - diody odpowiadają pozycjom poszczególnych ruchów (kolor czer
Manipulator RIMP 401 Rys. 13. Widok tablicy programowej 4. Uruchomienie robota W celu uruchomienia r
Manipulator RIMP 401 różne wyłączniki krańcowe, przełączniki drogowe, itp. podłączone do układu
Manipulator RIMP 401 1. Cel ćwiczenia Celem ćwiczenia jest zapoznawanie z budową i
Manipulator RIMP 401 Tabl.5.1 Rodzaj ruchu Skok ramienia 400 mm 600 mm Obrót ramienia
Manipulator RIMP 401 Rys.2. Przykładowy schemat sterowania numerycznego Interpolacja - sposób ruchów
Manipulator RIMP 401 - Ciągłe (CP - Continous Path) - sterowanie z poziomu programu sterującego zaró
Manipulator RIMP 401 Rys.5. Rozmieszczenie układów współrzędnych (Xo, Yg - globalny; Xb, Yb - podsta
Manipulator RIMP 401 3.3.4. Zakres działania - Skok silnika ramienia 60-400 (600)
Rys.3. Podzielnica zwykła. Wyposażenie normalne podzielnicy stanowi: konik z zabierakiem, podpórka d
więcej podobnych podstron