3443174335
RÓWNANIA KINEMATYKI ODWROTNEJ DLA MECHANICZNEGO RAMIENIA O JEDNYM STOPNIU SWOBODY
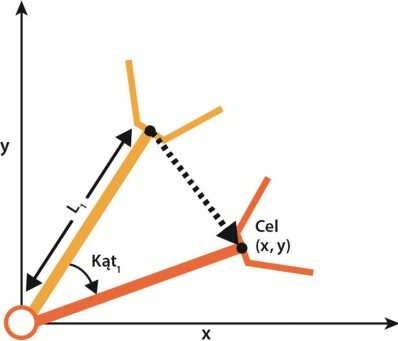
Jeżeli L1 =Vx2 + y2 /
oznacza to, że cel znajduje się w zasięgu ramienia
Ką^ = atan2 (y, x)
Wyszukiwarka
Podobne podstrony:
modele dynamiczne mechanizmów o jednym stopniu swobody, formułowanie równań ruchu maszyn, rozwiązywa
została na początku przetestowana na mechanizmie o jednym stopniu swobody, a następnie wdrożona w pr
Dynamika BudowliDrgania swobodne układów o jednym stopniu swobodywykład 2 Katedra Mechaniki Budowli
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
P1020655 (4) RÓWNANIE RUCHU DRGAJACFGO UKŁADU O JEDNYM STOPNIU SWOBODY gdzi e k -jest współczynnikie
Untitled 41 Outport Rys. 31. Model osc układu drgającego o jednym stopniu swobody
134 złomie istotności ot oraz dla ilości stopni swobody k = n - 2. Jeżeli r>r0^n 2 to możemy powi
Strona0023 2. DRGANIA LINIOWE UKŁADÓW O JEDNYM STOPNIU SWOBODY2.1. Wprowadzenie Drganiami swobodnymi
więcej podobnych podstron