8107620991
Optymalizacja położenia podpór
575
ktach tych bezwymiarowy moment zginający m = 1. Na podstawie rysunku 1 możemy zapisać:
dla s, ś £ ^ r/21+t, dla r]2i+l < f < rj2l+2, dla rj2i+2 < S < ji+1.
Wzór (3.1) zapewnia spełnienie warunku początkowego (2.6), jeśli
(3.2) *721+1 (0) = sh *721+2(0) = -Sj+i.
(3.1)
HS, r) =
S-s,
yu+i-s.
S-s,+l
*?2i+2 —■Si+l
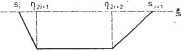
Rys. 1
Z (3.1) otrzymujemy rozkład przyśpieszeń
(3.3)
w(S, r)
V2i+l(*) (Si-S)
(V2i+l-s,)2
0
*72.'+2(T)(^I+l-^) (*?2i + 2-J«+l)2
dla Si < s < *?2i+i» dla »72ł+1 < S < *721+2 > dla 2721+2 < f < Jj+i-
Ponieważ w punktach 1=5; muszą istnieć stacjonarne, a w punktach f = *72i+i(T)» f = *721+2(7) — niestacjonarne przeguby plastyczne, mamy
(3.4) m(j|, t) = —1, m(r]2i+i, t) = /h(*72i+2> t) = 1, tm(1, r) = 0.
Podstawiając (3.3) do (2.5) i uwzględniając (3.4) otrzymujemy funkcjonał J w postaci
(3.5)

^21 + 2 [ 12__. 11__i)2n + 2
*721 + 2-^1 + 1 L *?2ł+2 —^1+1 2, + 2J) (ł72„ + 2_^B+l)2
Przy poszukiwaniu wartości stacjonarnej dla (3.5) możemy zauważyć, i&J = J(rj1,2720+2). Rzeczywiście, z (3.1) i (3.3) wynika, że
w(£, z) =
dla jj < f < *?2/+i,
dla 2721+2 < f < Jj+i-
11*
Wyszukiwarka
Podobne podstrony:
MECHANIKA TEORETYCZNA I STOSOWANA 4, 16 (1978) OPTYMALIZACJA POŁOŻENIA PODPÓR BELKI
577 Optymalizacja położenia podpór Należy podkreślić, że czas w którym kończy się faza pierwsza
579 Optymalizacja położenia podpór Z praktycznego punktu widzenia, po wyższy wskaźnik ekonomii
581 Optymalizacja położenia podpór h* jak i h są takie, że maksymalne przemieszczenia w obu belkach
CCI20110511�003 (5) Pooi por <x Wartość minwainego momentu zginającego na podporze. Me-r=i2^
skanuj0047 (8) stronie węglanów SrCOi i CaCOi. Zwróćmy uwagę, że do tych wniosków doszliśmy już na p
skanuj0047 (8) stronie węglanów SrCOi i CaCOi. Zwróćmy uwagę, że do tych wniosków doszliśmy już na p
skanuj0047 2 stronic węglanów SrCOi i CaCOi. Zwróćmy uwagę, że do tych wniosków doszliśmy już na pod
043 6 z pomiaru oraz wykres momentów obliczonych na podstawie wzorów teoretycznych (wg rys. 6.3). Ob
m4 r "I 100 5. Sprawdzamy, czy wyznaczone wykresy mają sens fizyczny (wykres momentu zginająceg
DSCN9344 II. Przygotowanie surowca Glinę do lepienia naczyń pobrano z tych złóż w Worytach, które na
KONSTRUKCJE STALOWE STR226 226 Przykład 7.9 (cd.) l Stosunek wartości momentów zginających na końcac
z Moment siły wzglądem prostej Na podstawie rysunku moment siły P względem prostej (osi) z można
skanuj0006 (333) Z tablic tych uzyskać można wielkości momentów zginających oraz ugięć w charakterys
skanuj0006 (333) Z tablic tych uzyskać można wielkości momentów zginających oraz ugięć w charakterys
G wiednich otworów w zależności od położenia podpory. 1. Położenie transportowe -
Narysować wykresy momentów zginających oraz sił. Wyznaczyć optymalny wymiar belki przy założeniu
więcej podobnych podstron