9650942978
Lekki zdalnie sterowany pojazd - jako nośnik wyposażenia specjalistycznego i uzbrojenia
2. STRUKTURY INFORMATYCZNE BEZZAŁOGOWYCH POJAZDÓW LĄDOWYCH
2.1. Wprowadzenie
Skuteczność działania BPL w największym stopniu uzależniona jest od struktury systemu informatycznego. W zależności od zakładanego stopnia autonomiczności w działaniu BPL zmienia się stopień rozłożenia tej struktury - od rozproszonej dla pojazdów zdalnie sterowanych do skoncentrowanej w BPL - dla pojazdów o wysokim stopniu autonomiczności.
2.2. Struktura systemu zdalnego sterowania BPL z wykorzystaniem układu wizyjnego
do rozpoznania otoczenia
W procesie doboru struktury i parametrów systemu wizyjnego należy wyróżnić podsystemy dla określania położenia i orientacji osprzętu roboczego oraz podsystem służący nawigacji przy manewrowaniu i jeździe pojazdu. Zagadnienia wizualizacji otoczenia muszą być powiązane z procesem geodezyjnej lokalizacji obiektu, rozpoznawaniem przeszkód oraz działaniem autonomicznym w przypadku uszkodzenia lub błędów w transmisji sygnałów.
Na podstawie analiz przebiegu procesów zdalnego sterowania pojazdami i maszynami inżynieryjnymi oraz własnych badań doświadczalnych stwierdzono, że system zdalnego sterowania powinien mieć budowę modułową i konieczne są następujące tory przepływu informacji i sygnałów sterujących (Rys. 5):
kontroli i sterowania układem napędowym a szczególnie jazdą pojazdu;
sterowania działaniem, położeniem wyposażenia dodatkowego oraz orientacją narzędzi i
osprzętów roboczych;
generowania i przekazywania informacji wizyjnych dla operatora oraz sterowania i kontroli działania układu wizyjnego (obserwacyjnego).
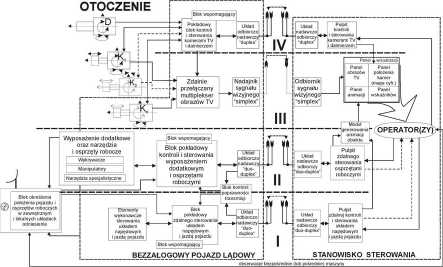
Rys. 5. Ogólna struktura systemu zdalnego sterowania BPL z wykorzystaniem systemu wizyjnego.
5
Wyszukiwarka
Podobne podstrony:
Lekki zdalnie sterowany pojazd - jako nośnik wyposażenia specjalistycznego i uzbrojenia strukturalny
Lekki zdalnie sterowany pojazd - jako nośnik wyposażenia specjalistycznego i uzbrojenia ukryciu. Bra
img225 (4) Rys. 165. Zdalnie sterowany pojazd Itsiężycowy wych” pudełek, różne „techniczne ozdoby” o
023/I8/ARi/15/Z Miniaturowy zdalnie sterowany czołg wyposażony w działko paintball Nabycie
jako wyposażenie specjalistycznych poradni psychologicznych dla szkól muzycznych podległych, w czasi
Systemowe oczyszczanie. Oczyszczanie automatyczne. Jako wyposażenie specjalne do ścian wodnych PWSL
Szybkobieżne Pojazdy Gąsienicowe (20) Nr 2, 2004 Franciszek KUCZMARSKI Andrzej TYPIAKLEKKI ZDALNIE S
1 Podstawy ogólne 2.1 Zawartość ciepła w parze Zaleta pary jako nośnika ciepła polega na tym, że w
img203 (3) Ry.s. 138. budowa zdalnie sterowanej wyrzutni szybowców nlcważ wewnątrz musi się przesuną
Perspektywy po studiach Jako absolwentki i absolwenci specjalności MIC Master będziecie bardzo dobrz
P1040038 3. Wyposażenie specjalne stosowane przy sprawdzaniu: mikrometrów i czuj.&
Schowek03 (11) Model zdalnie sterowany Zdalne sterowanie modeli za pomocą fal radiowych cieszy się
więcej podobnych podstron