9650942980
Lekki zdalnie sterowany pojazd - jako nośnik wyposażenia specjalistycznego i uzbrojenia
strukturalnych FLIR. Umożliwia to tworzenie modelu przestrzennego terenu, po którym przemieszcza się pojazd oraz określanie położenia przeszkód terenowych (Rys. 6). Powiązanie utworzonego modelu przestrzennego obszaru dookoła pojazdu z mapą cyfrową terenu pozwala na samodzielne autonomiczne poruszanie się pojazdu.
b)
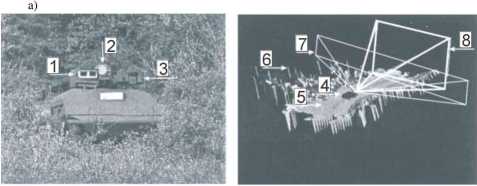
Rys. 6. Bezzałogowy pojazd rozpoznawczy (a) i model przestrzenny otoczenia (b):
1 - stereo wizyjny zestaw kamer kolorowych; 2 - LAD AR; 3 - stereowizyjny układ kamer FLIR; 4 -pojazd; 5 - droga przejazdu; 6 - teren nie rozpoznany; 7 - zakres obserwacji kamer; 8 - zakres obserwacji systemu laserowego.
Inne podejście zastosowano w programie PerceptOR (Rys. 7). Do wspomagania BPL zastosowano Bezzałogowy Środek Latający (BSL) - przekazujący informację o trasie, po której poruszał się będzie pojazd. Powinno to zapewnić skuteczne wykrywanie przeszkód, efektywne planowanie optymalnej drogi przemieszczania się pojazdu a także zapewnić wzrost jego prędkości.
a) b)
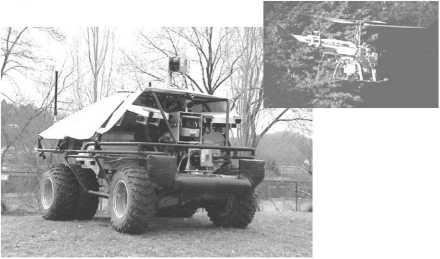
Rys. 7. Semiautonomiczny BPL opracowany w ramach programu PerceptOR:
a) pojazd lądowy; b) bezzałogowy' środek latający („Latające Oko" - „Flying Eye”).
7
Wyszukiwarka
Podobne podstrony:
Lekki zdalnie sterowany pojazd - jako nośnik wyposażenia specjalistycznego i uzbrojenia 2. STRUKTURY
Lekki zdalnie sterowany pojazd - jako nośnik wyposażenia specjalistycznego i uzbrojenia ukryciu. Bra
img225 (4) Rys. 165. Zdalnie sterowany pojazd Itsiężycowy wych” pudełek, różne „techniczne ozdoby” o
023/I8/ARi/15/Z Miniaturowy zdalnie sterowany czołg wyposażony w działko paintball Nabycie
jako wyposażenie specjalistycznych poradni psychologicznych dla szkól muzycznych podległych, w czasi
Systemowe oczyszczanie. Oczyszczanie automatyczne. Jako wyposażenie specjalne do ścian wodnych PWSL
Szybkobieżne Pojazdy Gąsienicowe (20) Nr 2, 2004 Franciszek KUCZMARSKI Andrzej TYPIAKLEKKI ZDALNIE S
1 Podstawy ogólne 2.1 Zawartość ciepła w parze Zaleta pary jako nośnika ciepła polega na tym, że w
img203 (3) Ry.s. 138. budowa zdalnie sterowanej wyrzutni szybowców nlcważ wewnątrz musi się przesuną
Perspektywy po studiach Jako absolwentki i absolwenci specjalności MIC Master będziecie bardzo dobrz
P1040038 3. Wyposażenie specjalne stosowane przy sprawdzaniu: mikrometrów i czuj.&
Schowek03 (11) Model zdalnie sterowany Zdalne sterowanie modeli za pomocą fal radiowych cieszy się
więcej podobnych podstron