1109810395
116 A. JOHN, A. MUSIOLIK
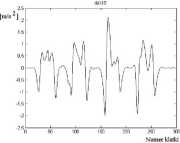
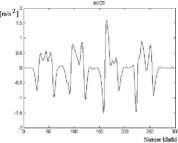
Rys. 7. Przyspieszenia liniowe wybranych punktów dla: a) palca obrączkowego, b) palca małego
5. WNIOSKI
Celem przedstawionej analizy strukturalnej ręki było zbadanie możliwości jej ruchu zależnie od liczby członów, par kinematycznych oraz sposobu ich połączenia. Zagadnienia analizy struktury, ruchliwości oraz klasyfikacji były podstawą dalszej analizy dotyczącej określania położeń, prędkości, przyspieszeń i sił działających na rozważany obiekt. Dane otrzymane z analizy kinematycznej są podstawą do wyznaczenia analizy dynamicznej palców ręki, a następnie zebrane dane będą pomocne w zaprojektowaniu urządzenia do rehabilitacji ręki.
LITERATURA
1. Morrison F.: Sztuka modelowania układów dynamicznych. Warszawa : WNT, 1996.
2. Morecki A., Knapczyk J., Kędzior K.: Teoria mechanizmów i manipulatorów. Warszawa 1973.
3. Jalón, J. and Bayo, E.: Kinematic and dynamie simulation of multibody Systems : the real-time challenge. New York: Springer Verlag, 1994.
KINEMATICS ANALYSIS OF FINGERS MOTION
Summary, The mathematical model is thoroughly described under the scope of the multibody formulation with natural coordinates, in which the position and orientation of the anatomical segments are represented using the Cartesian coordinates of points located in relevant anatomical landmarks of the hand, such as joints and extremities.
Wyszukiwarka
Podobne podstrony:
24 luty 07 (151) Rys. 4.3. Człony typu łącznik wraz z elementami określającymi położenie wybranych p
image 091 91 Szyki liniowy anten o niejednorodnym rozkładzie amplitud Rys. 5.3. Szyk liniowy anten z
skanuj0009 (192) nymi punktami (rys. 11-2). Odpowiadające tym punktom temperatury zostały określone
skanuj0075 (33) Rys. 3.13. Rozmieszczenie zgrzein punktowych w złączach rozciąganych [wg PN] Wymiary
img082 82 6. Metody aproksymacyjne Rys. 6.8. Dychotomie liniowe dla m = 2 oraz N = 4 Tabela 6.1. War
IMGW63 Rys. 6.16. Struktura anionu TCNQ Rys. 6.15. Liniowe uporządkowanie molekuł tecncyjsno-p-chino
Slajd26 (110) Przyspieszacz liniowy Bm DM1 Xmy targi* Forward poofccd X ray Fłattemng
skanowanie0076 -— więzi służbowe - - ---więzi funkcjonaJne Rys. 4.1. Struktura liniowa Ta ostatnia u
Rys. 4. Izolatory liniowe : a), b), c) niskiego napięcia (stojący dwu szyjkowy N, szpulowy S, szklan
Andrzej M. Brandt Density (g em 3) Rys. 4. Zależność
więcej podobnych podstron