1907968068
Laboratorium Podstaw Robotyki - 5 natarcia (podjazdu) narzędzia robota (patrz rys. 2). Pozycję początku układu końcówki wyrażoną w układzie {B} oznaczać będziemy za pomocą wektora p$ = \p§x p§y Pqz]t, a orientację osi tego układu względem osi układu {B} za pomocą ortonormalnej macierzy rotacji R$ = [n^ o§ aj?]. Reprezentacja pozycji układu końcówki jest jednoznaczna i oczywista jako uporządkowana trójka liczb reprezentujących współrzędne px,Py oraz pz punktu będącego środkiem układu końcówki względem poszczególnych osi ortokartezjańskiego układu {B}. Reprezentacja orientacji natomiast może wynikać z różnych konwencji opisu obrotów osi układu końcówki względem osi układu {B}. Wybrane reprezentacje orientacji oraz znaliza własności macierzy rotacji są przedmiotem dalszej części ćwiczenia.
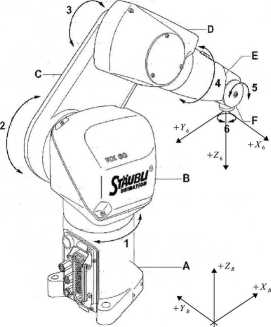
Rys. 2: Manipulator przemysłowy z przywiązanym układem współrzędnych końcówki roboczej.
1 Rotacje w 3D i ich reprezentacje
Oznaczmy przez {B} oraz {A} dwa kartezjańskie układy współrzędnych o wspólnym początku w punkcie O i ortogonalnych wersorach osi tych układów: i,j,k (dla układu {B}) oraz n,o,a (dla układu {A}) skierowanych odpowiednio wzdłuż osi X,Y i Z. Przyjmijmy że pierwszy układ współrzędnych jest bazowym układem odniesienia, natomiast drugi może się dowolnie obracać względem niego. Dla lepszego zobrazowania załóżmy, że układ {A} jest na stałe związany z bryłą sztywną umocowaną w punkcie O. Orientację układu {A} względem układu {B} możemy zapisać za pomocą następujących równań:
n = nxi + nyj + nzk, o = oxi + oyj + ozk, a = axi + ayj + azk,
Wyszukiwarka
Podobne podstrony:
12 Laboratorium Podstaw Robotyki - 6 • tool - typ opisujący narzędzie, zawiera
15 Laboratorium Podstaw Robotyki - 6 sięgu aplikacji) (patrz rys. 11). Okno zawiera typy proste i zł
Laboratorium Podstaw Robotyki jest wyposażone w dwa roboty przemysłowo-ednkacyjne typ L2, produkcji
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii SystemówĆWICZEN
3 Laboratorium Podstaw Robotyki - 5 gdzie nx,ny,nz stanowią składowe wersora n wzdłuż odpowiednich o
Laboratorium Podstaw Robotyki - 5 Z macierzami rotacji związane są dwa podstawowe zadania
5 Laboratorium Podstaw Robotyki - 5 1.4 Napisać definicję macierzy rotacji R®u w
Laboratorium Podstaw Robotyki - 52 Transformacje jednorodne Transformacje jednorodne umożliwiają
Laboratorium Podstaw Robotyki - 5 K2. zadanie kinematyki odwrotnej położenia IKin - polega ono na ok
Laboratorium Podstaw Robotyki - 5 Przy tak zdefiniowanych parametrach i układach współrzędnych
9 Laboratorium Podstaw Robotyki - 5 3.1 Zapoznać się z opisem następujących funkcj
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii SystemówĆWICZEN
75* 75* 10 Laboratorium Podstaw Robotyki - 6 =ńpplication manager= — teaching "frane
11 Laboratorium Podstaw Robotyki - 6 =Jog Interface Tool:(Palette) gripper Frerne:(PaleCte)
13 Laboratorium Podstaw Robotyki - 6 • for <num nCounter> = <num nBeginni
14 Laboratorium Podstaw Robotyki - 6 Rysunek 10: Widok pola Data w oknie głównym projektu.4.1
16 Laboratorium Podstaw Robotyki - 6 Rysunek 12: Widok emulatora kontrolera w SRS. a &nb
17 Laboratorium Podstaw Robotyki - 65.1 Przebieg zadania 5.1 Ułożyć klocki na
2 Laboratorium Podstaw Robotyki - 6 Rysunek 1: Manipulator Staubli TX60. Na rysunku oznaczono numery
więcej podobnych podstron