3220343205
napędy i sterowanie

Rys. 3. Przykłady miniładowarek kołowych o skręcie burtowym: a) Volvo; b) Caterpillar
ly, że zaczęto je stosować również w BPL wysokiej mobilności. Przykładem takiej konstnikcji jest pojazd Lewiatan (rys. 1 b). W odróżnieniu od zaprezentowanych wcześniej miniładowarek, nie posiada on jednak burtowego, lecz zwrotnicowy układ skrętu.
3. Koncepcja hydrostatycznego układu napędowego trójosiowej platformy wysokiej mobilności o skręcie burtowym
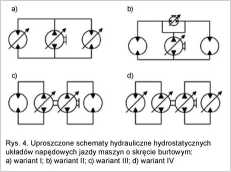
Burtowy system skrętu wymusza konieczność różnicowania prędkości kół (gąsienic) po prawej i lewej stronie pojazdu. Efekt ten można uzyskać przy różnych strukturach hydrostatycznych układów napędowych (rys. 4) [2,6]:
• wariant I - układ z jedną pompą hydrauliczną o zmiennej wydajności i dwoma silnikami hydraulicznymi o zmiennej chłonności;
• wariant II - układ z dwiema pompami hydraulicznymi o zmiennej wydajności i dwoma silnikami hydraulicznymi o stałej chłonności (równolegle połączenie pomp);
• wariant III - układ z dwiema pompami hydraulicznymi o zmiennej wydajności i dwoma silnikami hydraulicznymi o stałej chłonności (połączenie pomp na wspólnym wale);
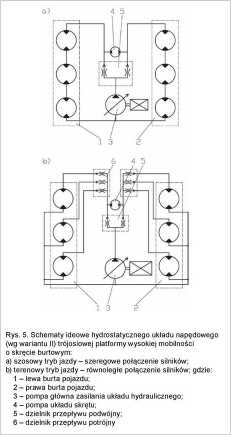
• wariant IV - układ z dwiema pompami hydraulicznymi o zmiennej wydajności i dwoma silnikami hydraulicznymi o zmiennej chłonności oraz jedną pompą do układu skrętu. W opracowywanej koncepcji hydrostatycznego układu napędowego trójosiowej platformy wysokiej mobilności o skręcie burtowym, dla 3-tonowego inżynieryjnego robota wsparcia, rozpatrywano dwie konfiguracje - wariant II i III. W niniejszym referacie bliżej zaprezentowano pierwszą z nich.
W wariancie II różnicowanie ilości czynnika roboczego, dopływającego liniami zasilającymi do silników prawej i lewej
Wyszukiwarka
Podobne podstrony:
napędy i sterowanie Rys. 1. Napęd, na którym realizowana jest eksploatacyjna diagnostyka Online drga
napędy i sterowanie Rys. 10. Schemat blokowy układu regulacji gdzie: s - odległość obiektu od począt
napędy i sterowanie Rys. 23. Siatka geometryczna utworzona z chmury punktów - metoda 2 (20) i powier
napędy i sterowanie Rys. 1. Struktury i funkcje, które spotyka się w inteligentnych budynkach. Rysun
napędy i sterowanie Rys. 2. Obszary rozwoju problematyki inteligentnych budynków są zbyt słabo ze so
napędy i sterowanie Rys. 4. System ekspercki jako ek 78 • Nr 12 • Grudzień 2015 r. Badania prowadzon
napędy i sterowanie Rys. 8. Silnik elektryczny BLDC o mocy 6,5 kW z przekładnią planetarną zamknięty
napędy i sterowanie Rys. 11. Silnik elektryczny szczotkowy prądu stałego 10 kW może pracować jako pr
IMG#66 (5) Rys. 9.4. Przykład schematu montażowego połączeń wewnętrznych wnęki sterowniczej pola
STEROWANIE EDYTUJ ETYKIETĘ Waga rozpocznij ważenie koniec ważenia Rys. 1 Przykładowy diagram TRG
1.8 Sterowniki modułowe Rys. 1.8. Przykład sterownika modułowego Elementy sterownika modułowego: •
Manipulator RIMP 401 Rys.2. Przykładowy schemat sterowania numerycznego Interpolacja - sposób ruchów
152 3 298 Rys. 7.37. Układ sterujący U. 1 sterownika z rys. 7.36 (przykład 7.6) a)
176 2 346 c)X1 X Rys. 9.l0(ciąg dalszy). Schemat układu sterowania pompami (przykład 9.7) Jest ona i
OMiUP t2 Gorski28 Rys. 7.61. Siłownik urządzenia sterowego z nurnikiem toroidalnym o przekroju kołow
więcej podobnych podstron