5768158552
napędy i sterowanie
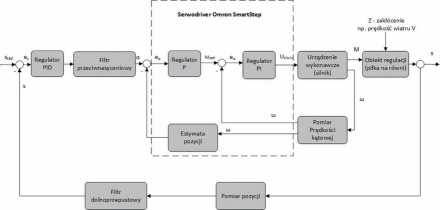
Rys. 10. Schemat blokowy układu regulacji
gdzie: s - odległość obiektu od początku równi pochyłej (mierzone od jednej ze stron) [cml; es - uchyb odległość obiektu [cm]; a - kąt nachylenia równi pochyłej [°]; e0 - uchyb kąta nachylenia równi pochyłej [°j; - zadana prędkość kątowa silnika [°/sj; tu - prędkość kątowa silnika [°/sj; ew - uchyb prędkości kątowej silnika: - napięcie PWM (ang. Pulse-Width Modulation) podawane na silnik [VI; M - moment obrotowy [N'm]; V - prędkość wiatru
(zakłócenie) (m/s)
Wykorzystano do tego następującą funkcję:

gdzie: a - współczynnik odpowiedzialny za kształt funkcji; b - współczynnik o wartości 1 lub -1 określający monoto-niczność funkcji; c - współczynnik opisujący punkt na osi x stanowiący połowę maksymalnej wartości, którą może przyjąć
Na wejście dwóch funkcji (8) (o parametrach dla malejącej
а, = 0,19; b, = 1,25; c, = 25, zaś rosnącej a2 = 0,19; b, = -1,55; Cj = 25), przedstawione na rys. 8, wprowadzany jest zaszumiony dystans o, a zwracane są wagi przynależności wybranych dwóch stałych czasowych filtru. Wagi te są odpowiednio wymnażane przez stałe czasowe równe 0,1 i 0,3 i następnie sumowane. Wynik tej operacji stanowi ostateczną stałą czasową filtru. Wyniki filtracji pokazano na rys. 9. Wraz ze wzrostem odległości filtr przełączany zaczyna przypominać działaniem filtr z niezmienną stałą czasową, tj. odfiltrowuje skutecznie sygnał przy zwiększonej częstotliwości szumów pomiarowych, ale odznacza się mniejszym opóźnieniem.
б. Układy sterowania
Na rys. 10 przedstawiono układ regulacji urządzeniem bali and beam. W projekcie zaprojektowano układ regulacji złożony z 3 regulatorów połączonych kaskadowo, co pozwala na osiągnięcie wysokiej dokładności pozycji oraz dużą funkcjonalność struktury. Wielkością sterowaną jest odległość piłki na równi pochyłej od jednego z boków s. Wielkością sterującą jest sygnał UmM zadawany na urządzenie wykonawcze - silnik. Sygnałem zakłócającym jest prędkość wiatru V, która wpływa na położenie piłki.
Pierwszy z regulatorów to zaimplementowany w PLC regulator PID. Kolejne dwa regulatory umieszczone w serwodrive-rze (P od położenia kąta i PI od prędkości obrotowej) zostały zaimplementowane przez producenta, który w jednym z regulatorów zastosował odczyt pozycji poprzez estymację pomiaru prędkości kątowej.
6.1. Układ z regulatorem PID
Regulator PID składa się z trzech członów: proporcjonalnego, całkującego, różniczkującego [14]. Sygnał wyjściowy opisuje następujące równanie:
u(t) = kp - e(t) + k, ■ j;e(t)dt + (9)
Nr 4 • Kwiecień 2015 r. • 109
Wyszukiwarka
Podobne podstrony:
239 (23) 238 Rozdział 4. Ocena przebiegów w układach regulacji... Rys. 4.44. Schemat blokowy układu
269 (19) 268 Rozdział 5. Układy regulacji impulsowej Rys. 5.27. Schemat blokowy układu regulacji imp
Rys. 17. Schemat blokowy układu ARCz: AU—sygnał regulacyjny ARCz, tzw. sygnał błędu dostrojenia
OMiUP t2 Gorski01 Rys. 7.40. Schemat blokowy układu sterowania nadążnego a * — zadany kąt wychylenia
235 (24) 234 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.41. Schemat blokowy układu
267ca6056ffa6281 Rys G4.Z Uproszczony schemat blokowy układu regulacji automaty c* R - regulator, OR
SNC00307 (3) 2.1. Reguhicja PID Rys.4.1 przedstawia schemat typowego układu regulacji, Kolą regulato
Modelowanie układu równań różniczkowych 205G M/D_ Rys. 17.2. Schemat blokowy układu równań (17.5) G
scan0004 (49) 3 Rys 2. Uproszczony schemat konstrukcyjny układu regulacji stałowartościowej, W znacz
6 (845) Rys. 10.6. Schemat blokowy Impulsowego spoktrometru NMR.10.7.1. Elektromag
Rys. 18.5. Schemat blokowy układu zasilania. Elementy precyzyjne układu wtryskowego którymi są: pary
TMP76 Rys. 3.14. Schemat blokowy układu urządzeń energetycznych w elektrowni kondensacyjnej, wg [11]
Uczciwek182 Rys. 48. Schemat elektryczny układu regulacji i przetwarzania sygnałów pomiarowych 1 - c
DSC00644 (10) R S T Schemat blokowy układu serwona pęd owego prądu przemiennego z silnikiem
więcej podobnych podstron