269 (19)
268 Rozdział 5. Układy regulacji impulsowej
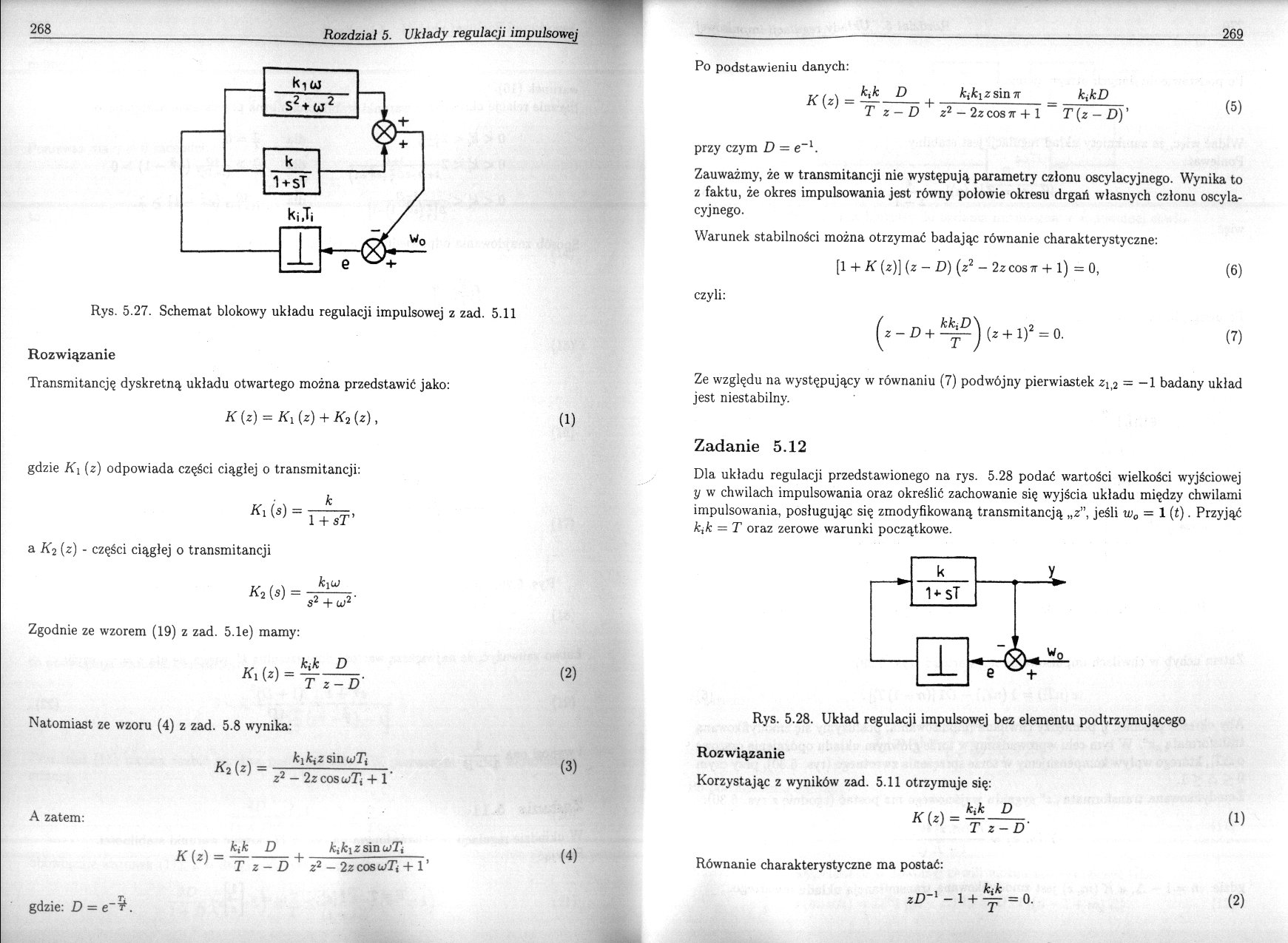
Rys. 5.27. Schemat blokowy układu regulacji impulsowej z zad. 5.11 Rozwiązanie
Transmitancję dyskretną układu otwartego można przedstawić jako:
K (z) = Ky (z) + Ki(z), (1)
gdzie Ki (z) odpowiada części ciągłej o transmitancji:
(«) =
k
1 + sT’ a K2 (z) - części ciągłej o transmitancji
kiu)
s2 + w2'
K2(S) =
Zgodnie ze wzorem (19) z zad. 5.1e) mamy:
K, (z) =
kik D ~T z-D'
Natomiast ze wzoru (4) z zad. 5.8 wynika:
K2(z) =
kikizsin wT) z2 — 2zcoswT) + 1'
A zatem:
kik D kifaz sin uTi
* \z) = --^ +
T z-D z2 -2zcosvTi + l’
T.
gdzie: D = e * ■
Po podstawieniu danych:
, , kik D kikizsinir hkD , .
K(’>-T7=D + z>-2,co^ + ,-f(7^D)' <5>
przy czym D = e~l.
Zauważmy, że w transmitancji nie występują parametry członu oscylacyjnego. Wynika to z faktu, że okres impulsowania jest równy połowie okresu drgań własnych członu oscylacyjnego.
Warunek stabilności można otrzymać badając równanie charakterystyczne:
[1 + K (z)] (z - D) (z2 - 2zcos7r + l) = 0, (6)
czyli:
(z-D+ ^) (z + l)2 = 0. (7)
Ze względu na występujący w równaniu (7) podwójny pierwiastek z\$ = — 1 badany układ jest niestabilny.
Zadanie 5.12
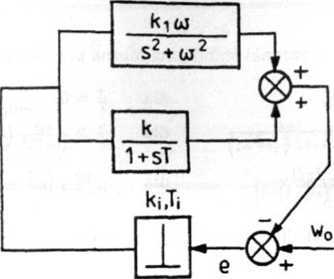
Dla układu regulacji przedstawionego na rys. 5.28 podać wartości wielkości wyjściowej y w chwilach impulsowania oraz określić zachowanie się wyjścia układu między chwilami impulsowania, posługując się zmodyfikowaną transmitancją „z”, jeśli iv0 = 1 (t). Przyjąć kik = T oraz zerowe warunki początkowe.
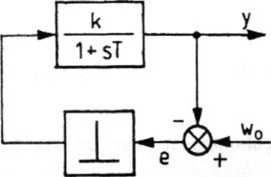
Rys. 5.28. Układ regulacji impulsowej bez elementu podtrzymującego
Rozwiązanie
Korzystając z wyników zad. 5.11 otrzymuje się:
K(z)
kik D T z-D'
Równanie charakterystyczne ma postać:
zD~l -

= 0.
Wyszukiwarka
Podobne podstrony:
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
253 (19) 252 Rozdział 5. Układy regulacji impulsowej Rys. 5.12. Obszar parametrów zapewniających sta
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
251 (19) 250 Rozdział 5. Układy regulacji impulsowej skąd wynika, że 250 Rozdział 5. Układy regulacj
261 (19) 260 Rozdział 5. Układy regulacji impulsowej uj — s/ićjći. Stabilność układu badamy na podst
263 (19) 262 Rozdział 5. Układy regulacji impulsowej gdzie: (3) D = e~%, L = e~ł. Transmitancja dysk
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
235 (24) 234 Rozdział 4. Ocena przebiegów w układach regulacji ... Rys. 4.41. Schemat blokowy układu
239 (23) 238 Rozdział 4. Ocena przebiegów w układach regulacji... Rys. 4.44. Schemat blokowy układu
napędy i sterowanie Rys. 10. Schemat blokowy układu regulacji gdzie: s - odległość obiektu od począt
Rys. 17. Schemat blokowy układu ARCz: AU—sygnał regulacyjny ARCz, tzw. sygnał błędu dostrojenia
Modelowanie układu równań różniczkowych 205G M/D_ Rys. 17.2. Schemat blokowy układu równań (17.5) G
Rys. 18.5. Schemat blokowy układu zasilania. Elementy precyzyjne układu wtryskowego którymi są: pary
19301 str060 (3) Rys. 4.27. Schemat blokowy filtru Kalmana. Adaptacja filtracji Kalmana dla wyznacze
TMP76 Rys. 3.14. Schemat blokowy układu urządzeń energetycznych w elektrowni kondensacyjnej, wg [11]
Modelowanie układu równań różniczkowych 205G M/D_ Rys. 17.2. Schemat blokowy układu równań (17.5) G
więcej podobnych podstron