253 (19)
252 Rozdział 5. Układy regulacji impulsowej
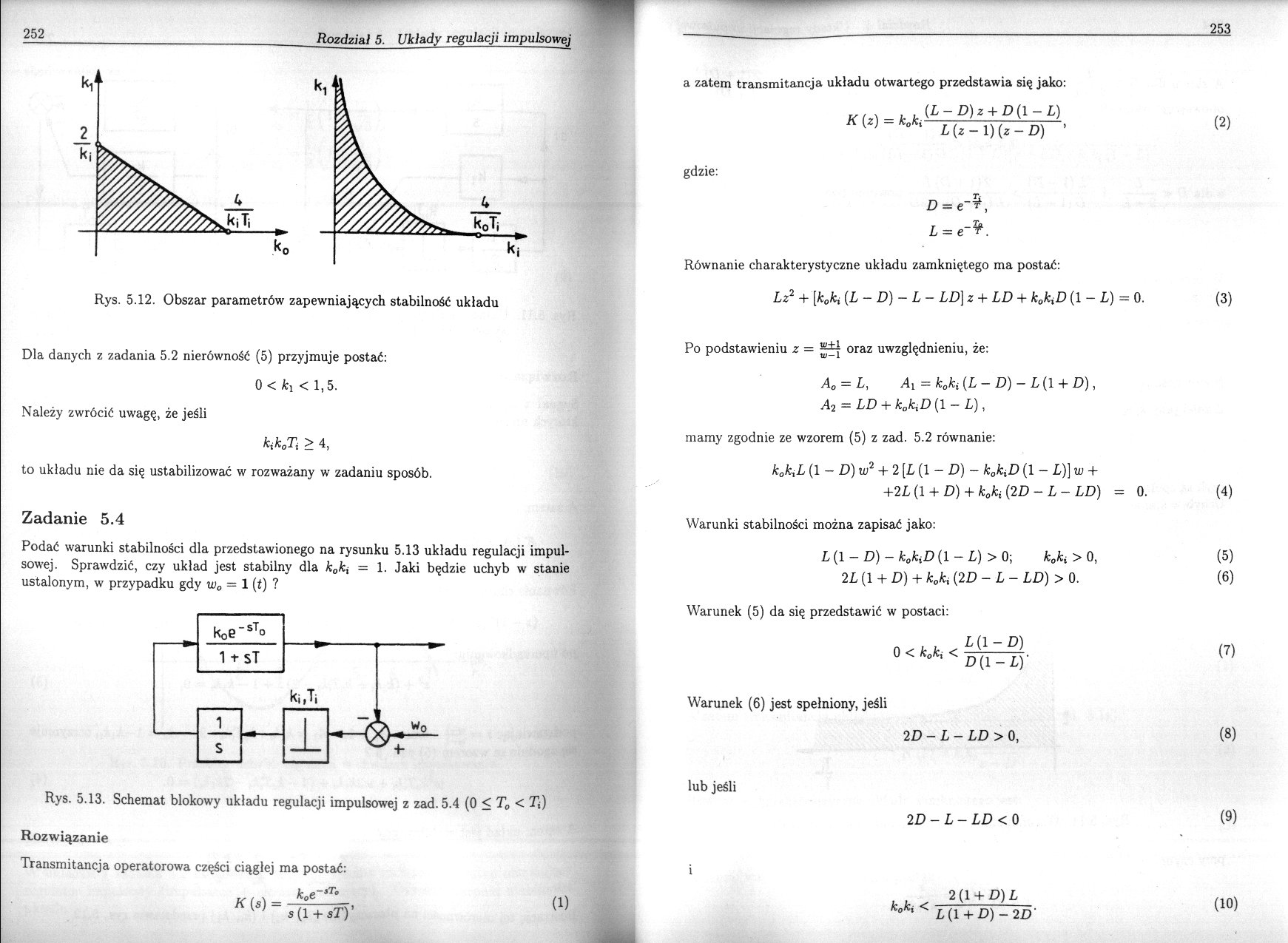
Rys. 5.12. Obszar parametrów zapewniających stabilność układu
Dla danych z zadania 5.2 nierówność (5) przyjmuje postać:
0 < k\ < 1,5.
Należy zwrócić uwagę, że jeśli
k,k0T, > 4,
to układu nie da się ustabilizować w rozważany w zadaniu sposób.
Zadanie 5.4
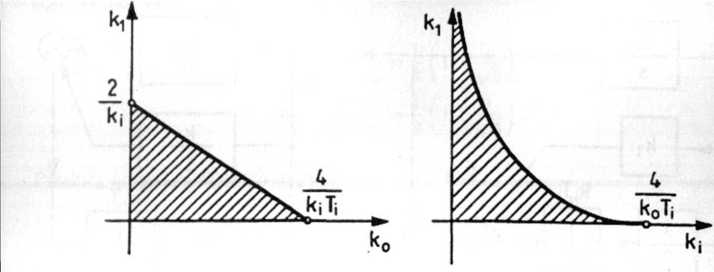
Podać warunki stabilności dla przedstawionego na rysunku 5.13 układu regulacji impulsowej. Sprawdzić, czy układ jest stabilny dla k0k, = 1. Jaki będzie uchyb w stanie ustalonym, w przypadku gdy tz;0 = 1 (t) ?

Rys. 5.13. Schemat blokowy układu regulacji impulsowej z zad. 5.4 (0 < T0 < Ti)
Rozwiązanie
Transmitancja operatorowa części ciągłej ma postać:
k eT9^0 = )•
K (z) = k0ki
(L - D) z + D (1 - L) L(z-l)(z-D)
gdzie:

Równanie charakterystyczne układu zamkniętego ma postać:
Lz2 + [k0ki (L-D)-L-LD]z + LD + k0kxD (1 - L) = 0.
Po podstawieniu z = oraz uwzględnieniu, że:
A0 = L, Ai = k0ki (L — D) — L (1 + D), Ai — LD + k0k{D (1 — Z#),
mamy zgodnie ze wzorem (5) z zad. 5.2 równanie:
k0k,L (1 - D) w2 + 2 [L (1 - D) - k0kiD (1 - L)] w +
+2L (! + £>) + k0ki [2D - L - LD) = 0.
Warunki stabilności można zapisać jako:
L (1 - D) - kgkxD (1 - L) > 0; k0kx > 0, 2 L (1 +D) + k0kt (2 D-L- LD) > 0.
Warunek (5) da się przedstawić w postaci:
Warunek (6) jest spełniony, jeśli
2D - L - LD > 0,
lub jeśli
2D - L - LD < 0
(10)
Wyszukiwarka
Podobne podstrony:
269 (19) 268 Rozdział 5. Układy regulacji impulsowej Rys. 5.27. Schemat blokowy układu regulacji imp
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
251 (19) 250 Rozdział 5. Układy regulacji impulsowej skąd wynika, że 250 Rozdział 5. Układy regulacj
261 (19) 260 Rozdział 5. Układy regulacji impulsowej uj — s/ićjći. Stabilność układu badamy na podst
263 (19) 262 Rozdział 5. Układy regulacji impulsowej gdzie: (3) D = e~%, L = e~ł. Transmitancja dysk
265 (18) 264 Rozdział 5. Układy regulacji impulsowej Rys. 5.25. Przebieg x (t) i v (t) dla n < t
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
więcej podobnych podstron