261 (19)
260 Rozdział 5. Układy regulacji impulsowej
uj — s/ićjći.
Stabilność układu badamy na podstawie równania charakterystycznego: z2 + z(-2coswTi + kik sinuTi) + 1 - fciJfcsina/7' = 0.
Podstawiając:
z =
w + 1
w- r
otrzymuje się:
w2+ 2w + l +(w2- 1) (kik sin uTi - 2 cos ujT{) + (w2 - 2tu + l) (1 - sin wT)) = 0, w2 (2 - 2cosuTi) + w (2kiksinuTi) + 2- 2ktksin+ 2coswT; = 0. (7)
Układ zamknięty jest więc stabilny, jeśli spełnione są nierówności:
1 > cos uTi,
kik sin u)Ti > 0,
1 - kik sin wT, + coswTi > 0.
Warunki (8) i (9) zachodzą, gdy:
ki > 0 oraz 21* < ujT{ < (21 + 1) * gdzie: l = 0,1,2,...
czyli
21* < y/kjtlT, < (21 + 1) TT,
21*
^ rr _ (21 + 1) *
' ~°’i’2,"■
Warunek (10) jest spełniony, gdy:
1 > kiksinuTi - cosu/Tj = yjkfk2 + 1 sin (u)Ti - (p),
gdzie
tg<p =
kik’
a więc, gdy
sin (uTi - ip) <
czyli
(12)
sin ( s/k0k{Ti — arctg--=L
Układ będzie stabilny, jeśli spełnione są nierówności (11) i (12). Na przykład jeśli k0 = ki = 1 [1] ,*» = !, to układ jest stabilny dla 0 < 7) < f.
Zadanie 5.9
Znaleźć transmitancję dyskretną układu z impulsatorem o skończonej szerokości impulsu 7 i obiektem o transmitancji
K^ = r+sT ^rys'5-21)
Rozważyć przypadek, w którym szerokość impulsu jest równa zero oraz gdy jest równa okresowi impulsoowania T,. Zbadać stabilność układu po zamknięciu.
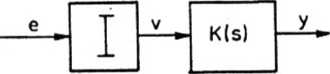
Rys. 5.21. Układ z impulsatorem o skończonej szerokości impulsu 7. Schemat blokowy układu
Rozwiązanie
Amplituda n-tego impulsu jest równa:
An = A;Je (n7J), a jego pole S„ = 7fcje (nTi).
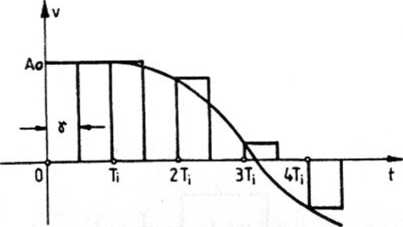
Rys. 5.22. Układ z impulsatorem o szerokości impulsu 7 Sygnał wyjściowy z impulsatora
Odpowiedź części ciągłej na pojedynczy impuls o amplitudzie k[ ma postać
k' (t) = [l - «-+] [1 (t) - 1 (t - 7)] + k\k0 [l - e~*] e-^1 (t - 7) • (1)
Wobec tego:
(2)
L
k' (nTi) = k\kJL—r^-Dnl (nTi—),
Wyszukiwarka
Podobne podstrony:
249 (21) 248 Rozdział 5. Układy regulacji impulsowej Zadanie 5.2 Zbadać stabilność układu regulacji
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
251 (19) 250 Rozdział 5. Układy regulacji impulsowej skąd wynika, że 250 Rozdział 5. Układy regulacj
253 (19) 252 Rozdział 5. Układy regulacji impulsowej Rys. 5.12. Obszar parametrów zapewniających sta
263 (19) 262 Rozdział 5. Układy regulacji impulsowej gdzie: (3) D = e~%, L = e~ł. Transmitancja dysk
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
269 (19) 268 Rozdział 5. Układy regulacji impulsowej Rys. 5.27. Schemat blokowy układu regulacji imp
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
więcej podobnych podstron