281 (19)
280 Rozdział 5. Układy regulacji impulsowej
otrzymujemy z3 + A„z2 + Atz + A2 = 0.
W celu skorzystania z warunków Hurwitza podstawmy:
w + 1
* ~ w-r
czyli mamy
(w + l)3 + A„ (w + l)2 (w - 1) + Ai (w - l)2 (w + 1) + A2 (w - l)3 = 0.
Zatem po uporządkowaniu:
w3 (1 + A0 + Ai + ylj) + w2 (3 + A0 — Ai — 3A2) +
+w (3 — A0 — Ai + 3^) + 1 ~ A0 + Ai — A2 = 0. (15)
Skąd wynikają warunki stabilności
1 + A0 + Ai + A2 >0,
3 + A0 - A\ - ZA2 > 0,
3 - A0 - Ai + 3A2 > 0,
1 — A0 + Ai — A2 > 0,
(3 + A0 — Ai — 3A2) (3 — A0 — Ai + 3A2) +
— (1 + A0 + Ai + A2) (1 — A0 + Ai — A2) > 0. (17)
Nierówność (17) można zapisać również w postaci:
(3 — A1)2 — (A0 — 3A2)2 — (1 + A1)2 + (A„ + A2)2 > 0. (18)
Warunki (16) i' (18) po podstawieniu A0, Ai, A2 są następujące:
kiT{ [&n + kiknk22 — kiki2k2i (1 + A)] (1 — D) > 0, (19)
(1 — D) [2^22 + 2 — k^kuk^Ti] + kikuTi (1 + D) + /nrij
+k3ki2k2iTi^ [L - 3LD + 2D] > 0, V
4 - kikuTi (1 -£>)(! + kik22) - k3kuk2iTi (4D - 3LD - L) > 0, (21)
— (1 — D) [2 + 2kikxi — kikiik^Ti] +
- kikuTi (1 + D)~ k3ki2k2iTj-j^ (L-2D + LD) > 0, (22)
3 - k*knk22Ti (1 - D) - D + kik22 (1 - D) + DkiknTi + ^knk2iTi^-^ (L - D)
+
kikuTi — 1 — D 4- kik22 (1 D) — 3kf k\2k2\TiD (1 — L)
1 + A
+
,1 +A
1 + D + kfkuknTi (1 - D) - k{k22 (!-£>)- DkikuTi - k*kl2k21Ti-j— (L - D)
+
kikuTi — 1 + kik22 (1 — IT) — D — kf k\2k2\TiD (1 — L)
14-A
> 0. (23)
Uwaga: Przydatność otrzymanych nierówności do syntezy układu (doboru jego parametrów) jest bardzo mała, można z nich jednak korzystać przy analizie układu.
Zadanie 5.15
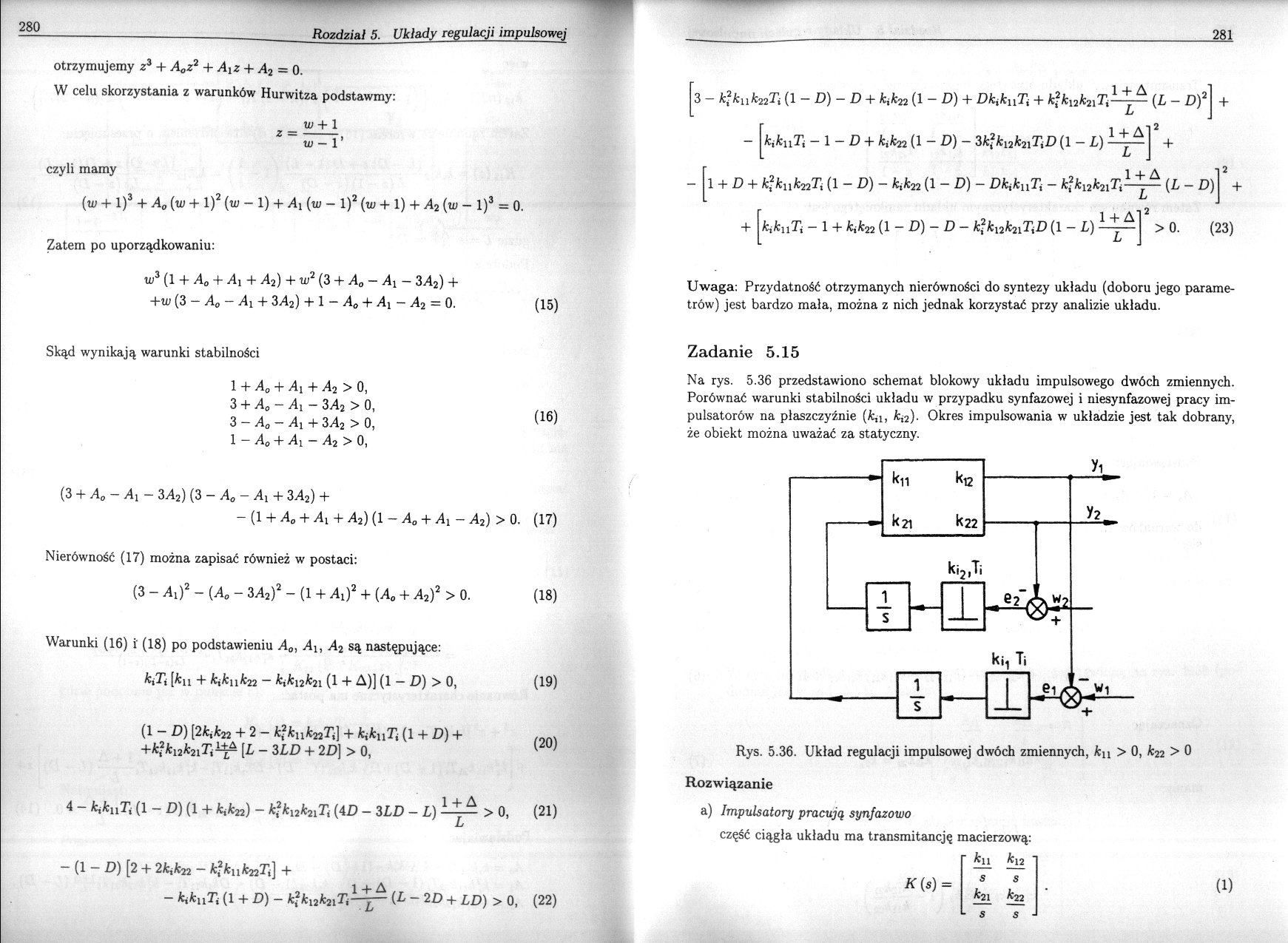
Na rys. 5.36 przedstawiono schemat blokowy układu impulsowego dwóch zmiennych. Porównać warunki stabilności układu w przypadku synfazowej i niesynfazowej pracy im-pulsatorów na płaszczyźnie (A:,i, kl2)- Okres impulsowania w układzie jest tak dobrany, że obiekt można uważać za statyczny.
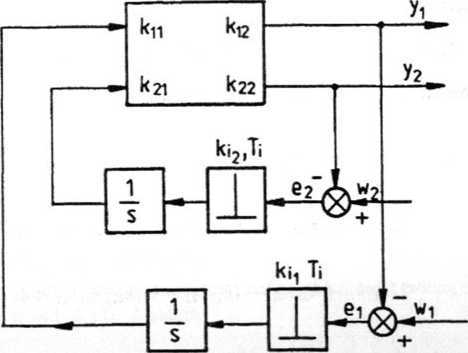
Rys. 5.36. Układ regulacji impulsowej dwóch zmiennych, ku > 0, k22 > 0 Rozwiązanie
a) Impulsatory pracują synfazowo
część ciągła układu ma transmitancję macierzową:
|
- kn |
k\2 |
|
s |
s |
|
k21 |
&22 |
|
- s |
S |
(1)
R(s) =
Wyszukiwarka
Podobne podstrony:
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
251 (19) 250 Rozdział 5. Układy regulacji impulsowej skąd wynika, że 250 Rozdział 5. Układy regulacj
253 (19) 252 Rozdział 5. Układy regulacji impulsowej Rys. 5.12. Obszar parametrów zapewniających sta
261 (19) 260 Rozdział 5. Układy regulacji impulsowej uj — s/ićjći. Stabilność układu badamy na podst
263 (19) 262 Rozdział 5. Układy regulacji impulsowej gdzie: (3) D = e~%, L = e~ł. Transmitancja dysk
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
269 (19) 268 Rozdział 5. Układy regulacji impulsowej Rys. 5.27. Schemat blokowy układu regulacji imp
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
więcej podobnych podstron