275 (19)
274 Rozdział 5. Układy regulacji impulsowej
dla
musi zachodzić:
0 < kikTi <
Ti l-D 1 - D
kikTi <
D-%{l-D)’
2(1 + D)
l + D-2% {l-D)'
dla
D T l-D
< — <
l-D Ti 2 (1 - D) 2 (1 + D)
0 < kikTi <
1 + D-2£(1-D)’
natomiast dla
T 1 + D — >
Tt 2(1- D)
wystarczy, by
kikTi > 0.
W celu wyznaczenia y (nT;) obliczamy:
y (z) = w (z) - ~TH] A
U l + K(z)Wo{Z> l + kik[^-T^\
__kjk {z [T, - T (1 - D)} - 7)D + T (1 - P)}__z_
z2 + z (-1 - D + kikTi - ktkT (1 - D)] + D - k{kTiD + kikT (1 - D) z - 1' Po podstawieniu danych:
ze-1 + 1 - 2e~ł z 0,368z + 0,264 z
(15)
Y(z) =
z2 — z + 1 - e~l z — 1 z2 — z + 0,632 z — 1
(16)
W celu znalezienia y (nTi) zastosujemy odwrotne przekształcenie „z” (i twierdzenie całkowe Cauchy’ego):
y(nTi) = ^rJY(z)zn-'dz =
1 / 0,361 2irj f z2 —
368z +0,264 z"
z + 0,632 z — 1
dz =
gdzie K jest konturem zamkniętym w płaszczyźnie zmiennej zespolonej z i obejmuje wszystkie punkty osobliwe funkcji podcałkowej, w tym przypadku jej bieguny.
Biegunami funkcji podcałkowej są pierwiastki jej mianownika, czyli:Natomiast wartości residuum w biegunie z* obliczamy jako:
res [Y(z)zn-']t=ti=(z-zt)Y(z)zn-\=ir
A zatem
res[y(z)z»-U = ¥fS = 1.
rpę W M rn-ll _ 0,368(0,5+30,6181+0,264(0,5+j0,618)" _
res (X yZJ Z J*=o,5+30,618 — 2(30,618)(0,5+3'0,618-1)
= 0,512e-’167,8° (0,794)" (cosn51° + j sinn51°).
rpc, W (7n-11 - 0,368(0,5-j0,618)+0,264(0,5-j0,618)"
res [X (Z) z Jz=0,s—j0,618 — 2(—y0,618)(0,5—yo.618—1)
= -0,512e-’12,2' (0,794)" (cosn51° - j sin n51°).
Podstawiając otrzymane wyniki do (17) otrzymujemy:
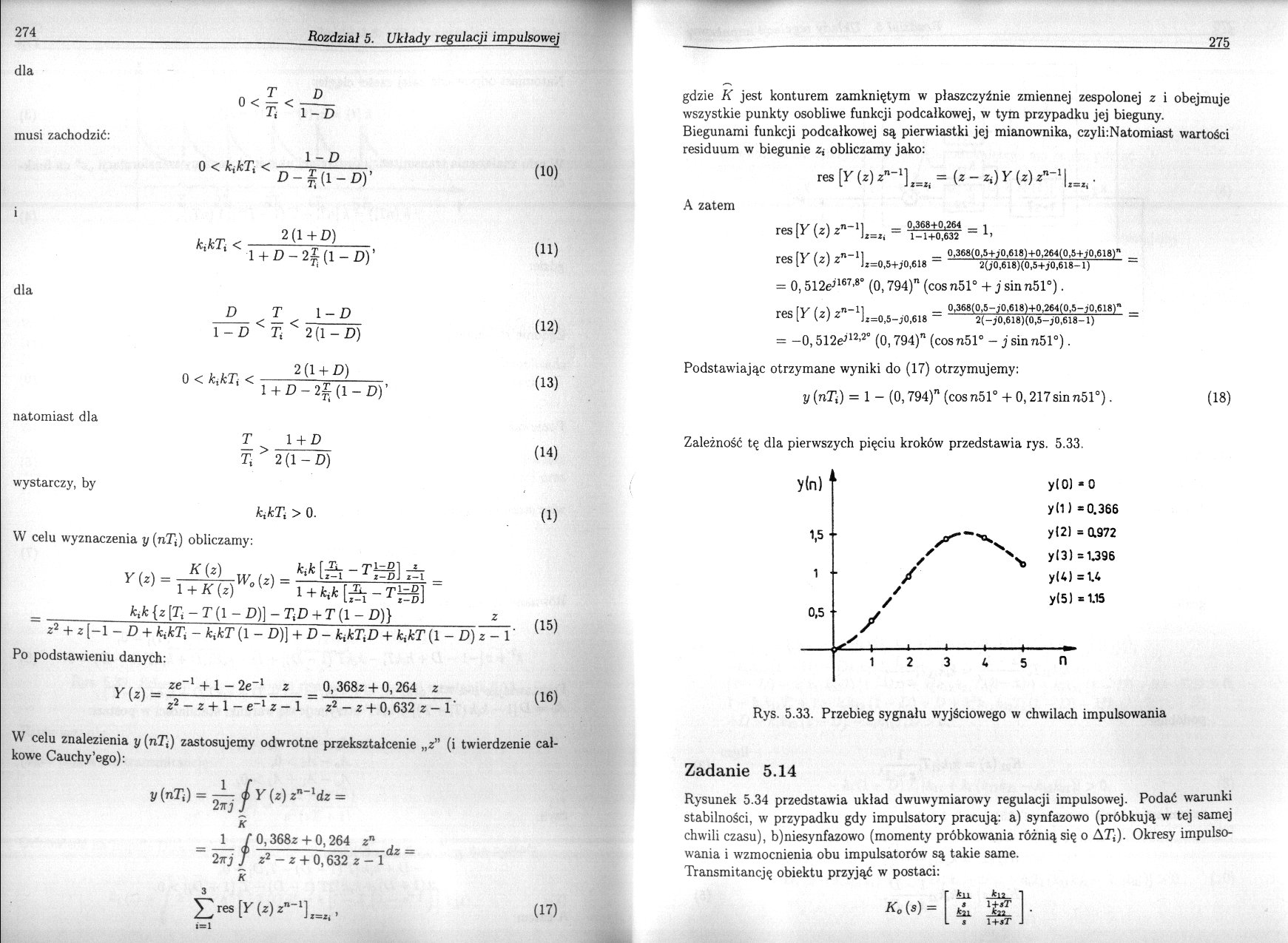
y(nTi) = 1 - (0,794)" (cosn51° + 0,217sinn51°). (18)
Zależność tę dla pierwszych pięciu kroków przedstawia rys. 5.33.
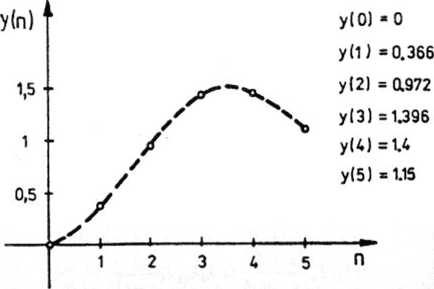
Rys. 5.33. Przebieg sygnału wyjściowego w chwilach impulsowania
Zadanie 5.14
Rysunek 5.34 przedstawia układ dwuwymiarowy regulacji impulsowej. Podać warunki stabilności, w przypadku gdy impulsatory pracują: a) synfazowo (próbkują w tej samej chwili czasu), b)niesynfazowo (momenty próbkowania różnią się o AT,). Okresy impulsowania i wzmocnienia obu impulsatorów są takie same.
Transmitancję obiektu przyjąć w postaci:
K(s) =
*11 *12 s \+sT J
Wyszukiwarka
Podobne podstrony:
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
251 (19) 250 Rozdział 5. Układy regulacji impulsowej skąd wynika, że 250 Rozdział 5. Układy regulacj
253 (19) 252 Rozdział 5. Układy regulacji impulsowej Rys. 5.12. Obszar parametrów zapewniających sta
261 (19) 260 Rozdział 5. Układy regulacji impulsowej uj — s/ićjći. Stabilność układu badamy na podst
263 (19) 262 Rozdział 5. Układy regulacji impulsowej gdzie: (3) D = e~%, L = e~ł. Transmitancja dysk
269 (19) 268 Rozdział 5. Układy regulacji impulsowej Rys. 5.27. Schemat blokowy układu regulacji imp
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
255 (20) 254 Rozdział 5. Układy regulacji impulsowej A zatem dla D > - 2-L obowiązuje warunek , a
265 (18) 264 Rozdział 5. Układy regulacji impulsowej Rys. 5.25. Przebieg x (t) i v (t) dla n < t
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
więcej podobnych podstron