263 (19)
262 Rozdział 5. Układy regulacji impulsowej
gdzie:
(3)
D = e~%, L = e~ł.
Transmitancja dyskretna ma zatem zgodnie ze wzorami (17) i (18) z zad. 5.1 postać:
K(z) = k%
D(l~L)
L(z - D)
Jeśli założy się, że Sn = const przy 7 —> 0, to otrzymuje się k, = k[7 = const. Wówczas
lim K (z) = lim 7—*0 7 ■'
■ ° ń \-k% =
o z - D e~ł
e
D e?
= lim -— —
7—>o z — D
I. 1 k0k{ —kik0 -
z - D
Wynik ten zgodny jest z transmitancją dyskretną układu, w którym występuje impulsator idealny (zad. 5.1e).
Jeśli przyjąć, że 7 —> Ti, to:
(6)
kik0 D (1 - D) _ kik01 - D ~ T D(z-D) ~ ~T~z-D'
Wyrażenie (6) zgodne jest z transmitancją dyskretną układu z impulsatorem idealnym i członem podtrzymującym zerowego rzędu (zad. 5.Ig), przy czym w mianowniku występuje tu T, wynikające z faktu, że k, reprezentuje pole impulsu o szerokości 7), a nie pole impulsu idealnego (o szerokości 7 —> 0).
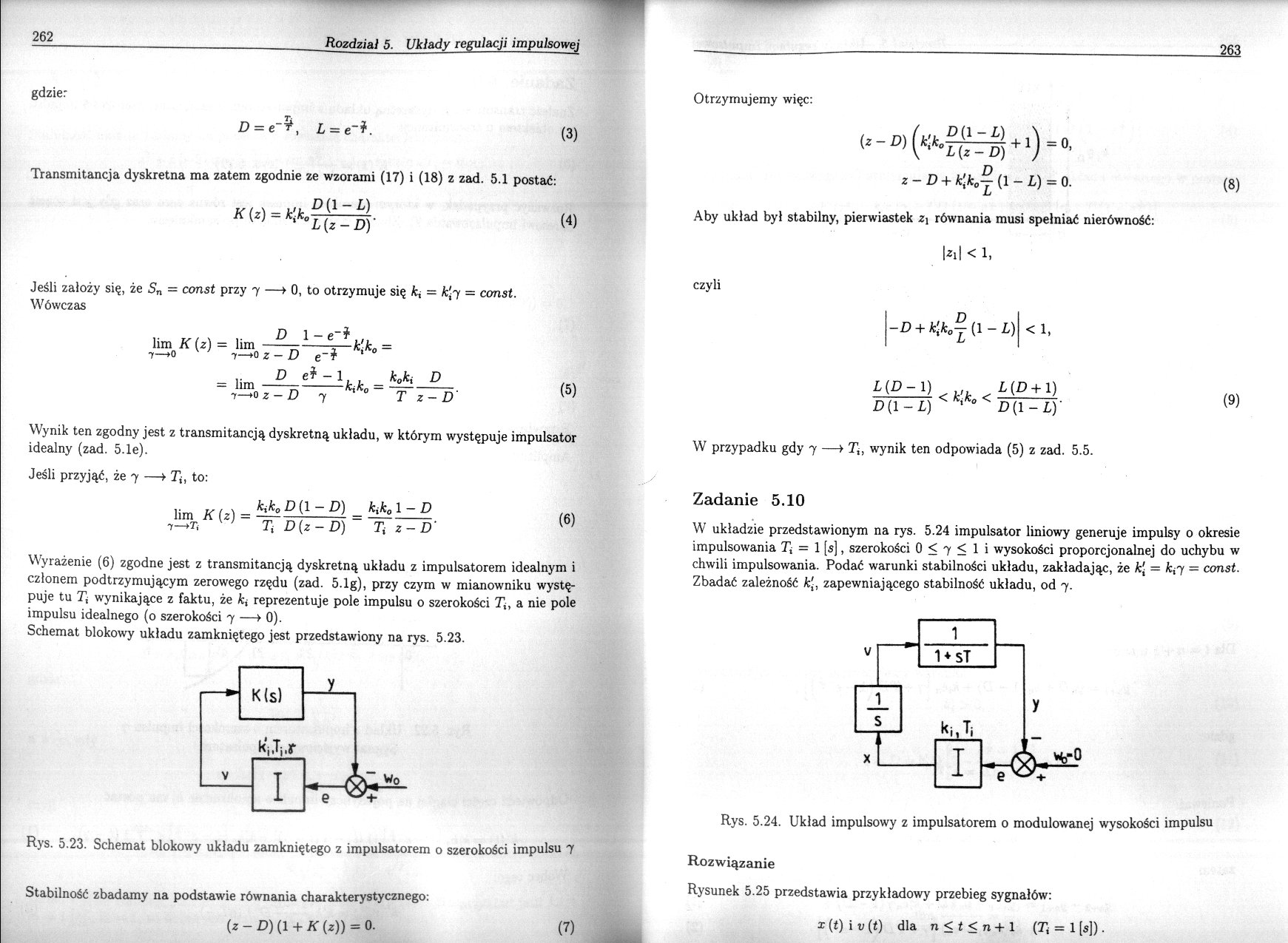
Schemat blokowy układu zamkniętego jest przedstawiony na rys. 5.23.
Rys. 5.23. Schemat blokowy układu zamkniętego z impulsatorem o szerokości impulsu 7
Stabilność zbadamy na podstawie równania charakterystycznego:
Otrzymujemy więc:
Aby układ był stabilny, pierwiastek Z\ równania musi spełniać nierówność:
czyli

(9)
W przypadku gdy 7 —> Tit wynik ten odpowiada (5) z zad. 5.5.
Zadanie 5.10
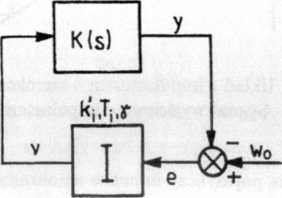
W układzie przedstawionym na rys. 5.24 impulsator liniowy generuje impulsy o okresie impulsowania T; = 1 [s], szerokości 0 < 7 < 1 i wysokości proporcjonalnej do uchybu w chwili impulsowania. Podać warunki stabilności układu, zakładając, że k[ = ki7 = const. Zbadać zależność k[, zapewniającego stabilność układu, od 7.
1
V

1 + ST
Rys. 5.24. Układ impulsowy z impulsatorem o modulowanej wysokości impulsu Rozwiązanie
Rysunek 5.25 przedstawia przykładowy przebieg sygnałów:
x (t) i v (t) dla n < t < n + 1 (T< = 1 [5]).
Wyszukiwarka
Podobne podstrony:
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
251 (19) 250 Rozdział 5. Układy regulacji impulsowej skąd wynika, że 250 Rozdział 5. Układy regulacj
253 (19) 252 Rozdział 5. Układy regulacji impulsowej Rys. 5.12. Obszar parametrów zapewniających sta
261 (19) 260 Rozdział 5. Układy regulacji impulsowej uj — s/ićjći. Stabilność układu badamy na podst
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
269 (19) 268 Rozdział 5. Układy regulacji impulsowej Rys. 5.27. Schemat blokowy układu regulacji imp
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
więcej podobnych podstron