289 (18)
288 Rozdział 5. Układy regulacji impulsowej
Zadanie 5.17
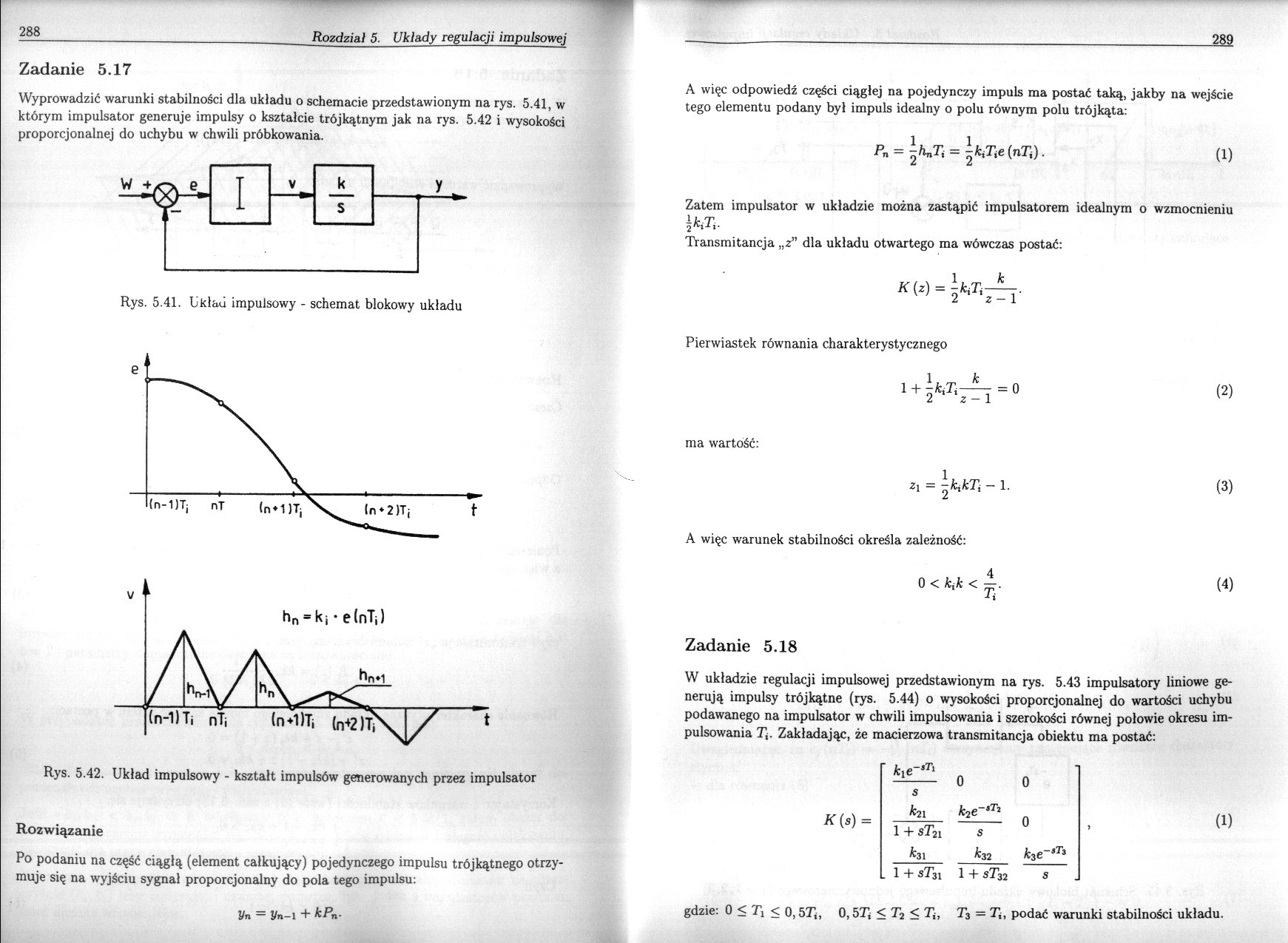
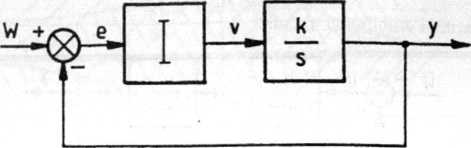
Wyprowadzić warunki stabilności dla układu o schemacie przedstawionym na rys. 5.41, w którym impulsator generuje impulsy o kształcie trójkątnym jak na rys. 5.42 i wysokości proporcjonalnej do uchybu w chwili próbkowania.
Rys. 5.41. Układ impulsowy - schemat blokowy układu
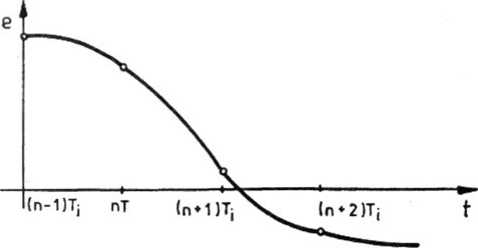
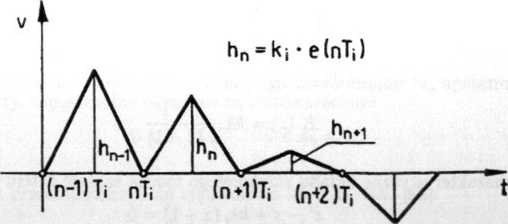
Rys. 5.42. Układ impulsowy - kształt impulsów generowanych przez impulsator
Rozwiązanie
Po podaniu na część ciągłą (element całkujący) pojedynczego impulsu trójkątnego otrzymuje się na wyjściu sygnał proporcjonalny do pola tego impulsu:
Vn — ł/n—1 4" hPn-
A więc odpowiedź części ciągłej na pojedynczy impuls ma postać taką, jakby na wejście tego elementu podany był impuls idealny o polu równym polu trójkąta:
(1)
Pn = \hnTi = l-We (nTi).
Zatem impulsator w układzie można zastąpić impulsatorem idealnym o wzmocnieniu
ijicT 2'W-* x*
Transmitancja „z” dla układu otwartego ma wówczas postać:
K(z)

k
z — 1
Pierwiastek równania charakterystycznego
= 0
ma wartość:
(3)
(4)
zi = ^k,kTi - 1.
A więc warunek stabilności określa zależność:
0 < kik <
Zadanie 5.18
W układzie regulacji impulsowej przedstawionym na rys. 5.43 impulsatory liniowe generują impulsy trójkątne (rys. 5.44) o wysokości proporcjonalnej do wartości uchybu podawanego na impulsator w chwili impulsowania i szerokości równej połowie okresu impulsowania Ti. Zakładając, że macierzowa transmitancja obiektu ma postać:
K(s)
|
kie~,Tl s |
0 |
0 |
|
k 21 |
k2e~,Tt |
0 |
|
1 + sT2\ |
s | |
|
^31 |
ki2 |
k3e-,T> |
|
1 + sTn |
1 + sT$ 2 |
s |
gdzie: 0 < Tx < 0,5T1, 0,5T< <T2< Tit Ti = Ti, podać warunki stabilności układu.
Wyszukiwarka
Podobne podstrony:
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
265 (18) 264 Rozdział 5. Układy regulacji impulsowej Rys. 5.25. Przebieg x (t) i v (t) dla n < t
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
299 (17) 298 Rozdział 5. Układy regulacji impulsowej czyli Qn+1 9n+2 L Qn t
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
259 (17) 258 Rozdział 5. Układy regulacji impulsowejZadanie 5.7 W układzie regulacji impulsowej z za
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
243 (23) 242 Rozdział 5. Układy regulacji impulsowej Zadanie 5.1 5.2, gdy część ciągła Znaleźć
245 (21) 244 Rozdział 5. Układy regulacji impulsowej Transmitancja dyskretna ma zatem postać: K{z) =
więcej podobnych podstron