245 (21)
244 Rozdział 5. Układy regulacji impulsowej
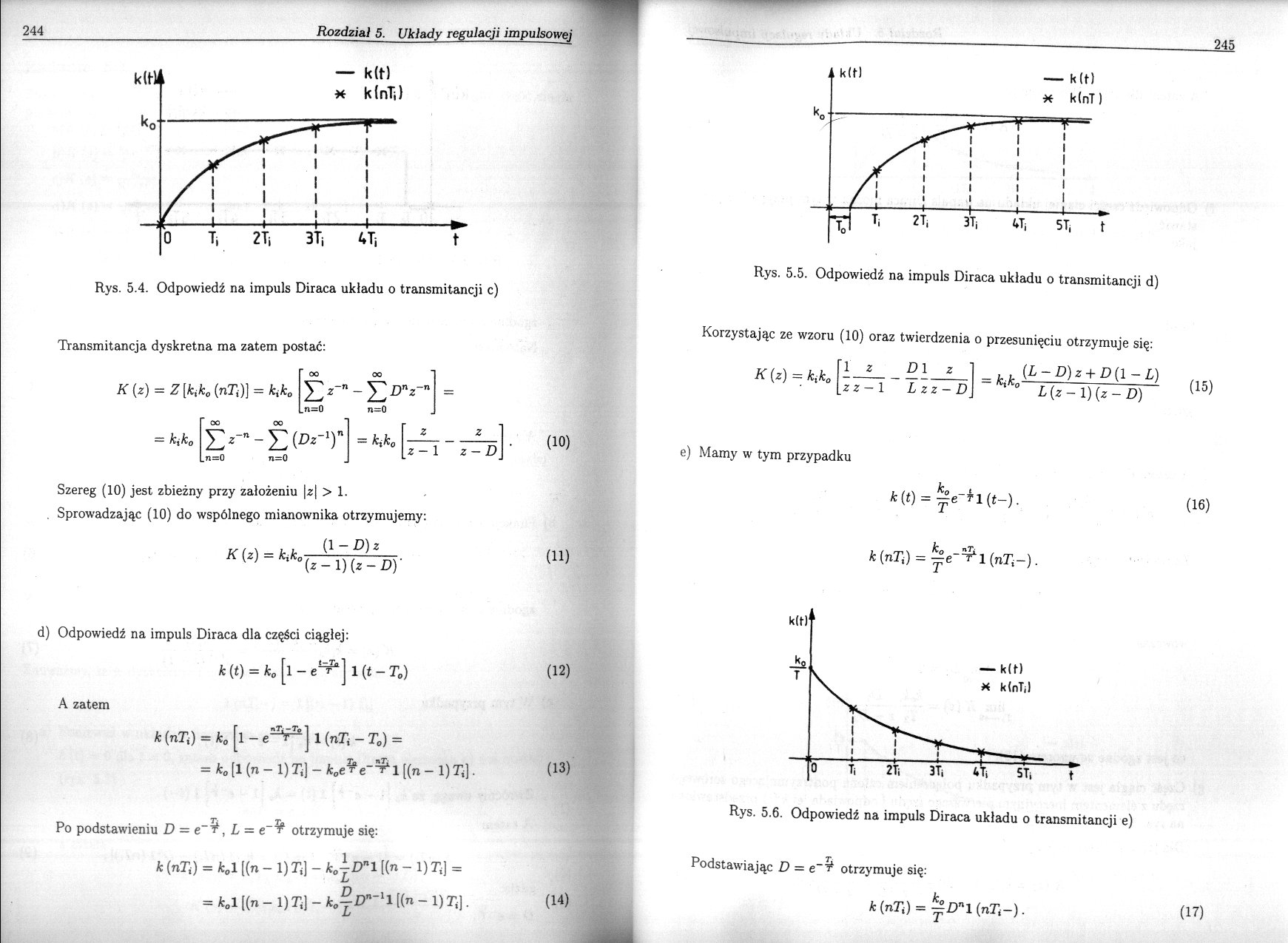
Transmitancja dyskretna ma zatem postać:
K{z) = Z[kik0 {nTi)] = kik0
n=0
n=0
n=0
z — 1 z — D
Szereg (10) jest zbieżny przy założeniu |z| > 1. Sprowadzając (10) do wspólnego mianownika otrzymujemy:
K (z) = kik0
(1--P)*
{z-\){z-D)'
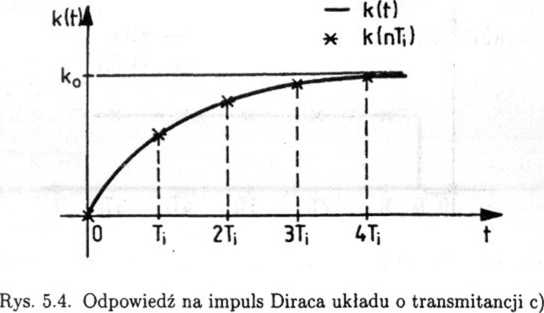
d) Odpowiedź na impuls Diraca dla części ciągłej:
k (t) = &0 [l — J 1 (t — T0) (12)
A zatem
k [nTi) = k0 [l - e1^] 1 (nT; - T0) =
= k„ [1 (n - 1) Ti] - [(n - 1) Ti]. (13)
Po podstawieniu D = e~r, L = otrzymuje się:
k (nTi) = K1 [(n - 1) Ti] - kĄDn 1 [(n - 1) Ti] =
= k0l [(n - 1) Ti] - kĄDn~ll [(n - 1) Ti].
Rys. 5.5. Odpowiedz na impuls Diraca układu o transmitancji d)
Korzystając ze wzoru (10) oraz twierdzenia o przesunięciu otrzymuje się:
K (z) = kik0
1
Dl
z z — 1 L z z - D
(L-D)z + D(l-L) k,k° L(z-l)(z-D) { 5)
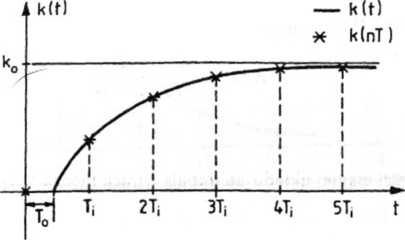
e) Mamy w tym przypadku
k(t) = ^e~h(t-). (16)
k(nTi) = ^e-^l(nTl~).
Rys. 5.6. Odpowiedź na impuls Diraca układu o transmitancji e)
T
Podstawiając D = e~r otrzymuje się:
^(nri) = ^Dnl(nT<-). (17)
Wyszukiwarka
Podobne podstrony:
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
249 (21) 248 Rozdział 5. Układy regulacji impulsowej Zadanie 5.2 Zbadać stabilność układu regulacji
263 (19) 262 Rozdział 5. Układy regulacji impulsowej gdzie: (3) D = e~%, L = e~ł. Transmitancja dysk
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
299 (17) 298 Rozdział 5. Układy regulacji impulsowej czyli Qn+1 9n+2 L Qn t
243 (23) 242 Rozdział 5. Układy regulacji impulsowej Zadanie 5.1 5.2, gdy część ciągła Znaleźć
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
więcej podobnych podstron