249 (21)
248 Rozdział 5. Układy regulacji impulsowej
Zadanie 5.2
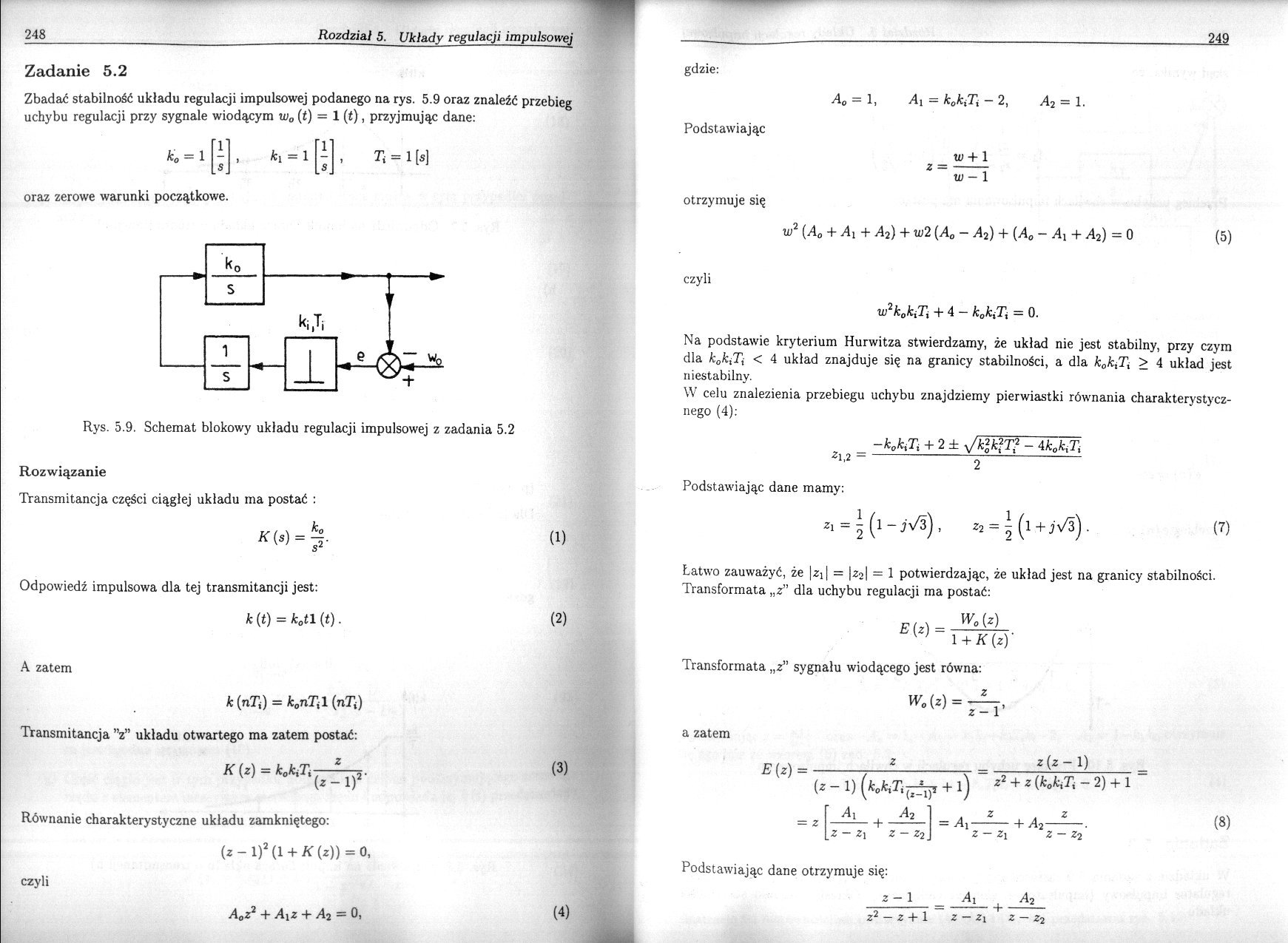
Zbadać stabilność układu regulacji impulsowej podanego na rys. 5.9 oraz znaleźć przebieg uchybu regulacji przy sygnale wiodącym w„ (t) = 1 (t), przyjmując dane:


oraz zerowe warunki początkowe.
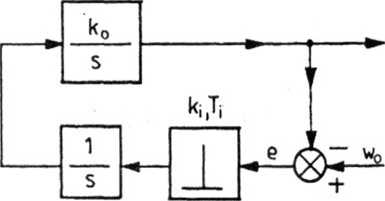
Rys. 5.9. Schemat blokowy układu regulacji impulsowej z zadania 5.2
Rozwiązanie
Transmitancja części ciągłej układu ma postać :
k„
(1)
(2)
K (s) =
Odpowiedź impulsowa dla tej transmitancji jest:
k (t) = k0tl (t).
A zatem
k (nTi) = k0nTi 1 (nTj)
Transmitancja ”z” układu otwartego ma zatem postać:
K(z) = k0kiTi-^-3.
(z - 1)
Równanie charakterystyczne układu zamkniętego:
(z-l)2(l + tf(z))=0,
czyli
gdzie:
A0 = 1, A\ = k0kiTi - 2, A2 = 1.
Podstawiając
z =
w + 1
ty - 1
czyli
w2k0kiTi + 4 — k0kiTi = 0.
Na podstawie kryterium Hurwitza stwierdzamy, że układ nie jest stabilny, przy czym dla k0kiTj < 4 układ znajduje się na granicy stabilności, a dla k0ktTx > 4 układ jest niestabilny.
W celu znalezienia przebiegu uchybu znajdziemy pierwiastki równania charakterystycznego (4):
-k0k{Ti + 2 ± ^kjk?T? - Ak0kiTi zi,2 =-2-
Podstawiając dane mamy:
zi = \ (i - 3) , 22 = ^ (l + jV5) . (7)
Łatwo zauważyć, że |zi| = |z2| = 1 potwierdzając, że układ jest na granicy stabilności. Transformata „z” dla uchybu regulacji ma postać:
E(z) =
W0{z)
1 + K(z)'
Transformata „z” sygnału wiodącego jest równa:
z
W0(z) =
z- r
a zatem
E(z) =
2(2-1)
Z — Z\ z
Podstawiając dane otrzymuje się:
Z — Zi z — z2
Ai + A2
- 1
Z2 — Z + 1 Z — Zl Z — z2
(8)
Wyszukiwarka
Podobne podstrony:
245 (21) 244 Rozdział 5. Układy regulacji impulsowej Transmitancja dyskretna ma zatem postać: K{z) =
078 079 78 Anna Kamińska. Artur Gas Zadanie 2 Zbadać stabilność układu opisanego równaniem
078 079 78 Anna Kamińska. Artur Gas Zadanie 2 Zbadać stabilność układu opisanego równaniem
243 (23) 242 Rozdział 5. Układy regulacji impulsowej Zadanie 5.1 5.2, gdy część ciągła Znaleźć
259 (17) 258 Rozdział 5. Układy regulacji impulsowejZadanie 5.7 W układzie regulacji impulsowej z za
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
więcej podobnych podstron