259 (17)
258 Rozdział 5. Układy regulacji impulsowej
Zadanie 5.7
W układzie regulacji impulsowej z zadania 5.6 proporcjonalną część ciągłą zastąpiono regulatorem PD o transmitancji Kr (s) — kr + Trs. Jak zmienią się warunki stabilności w układzie?
Odpowiedź
Warunki stabilności będą miały postać:
ki 1 “f* Df . . n
0 < — < 2--—, gdzie Dr = e >+*>*«Ti
kr 1 - Dr
Zadanie 5.8
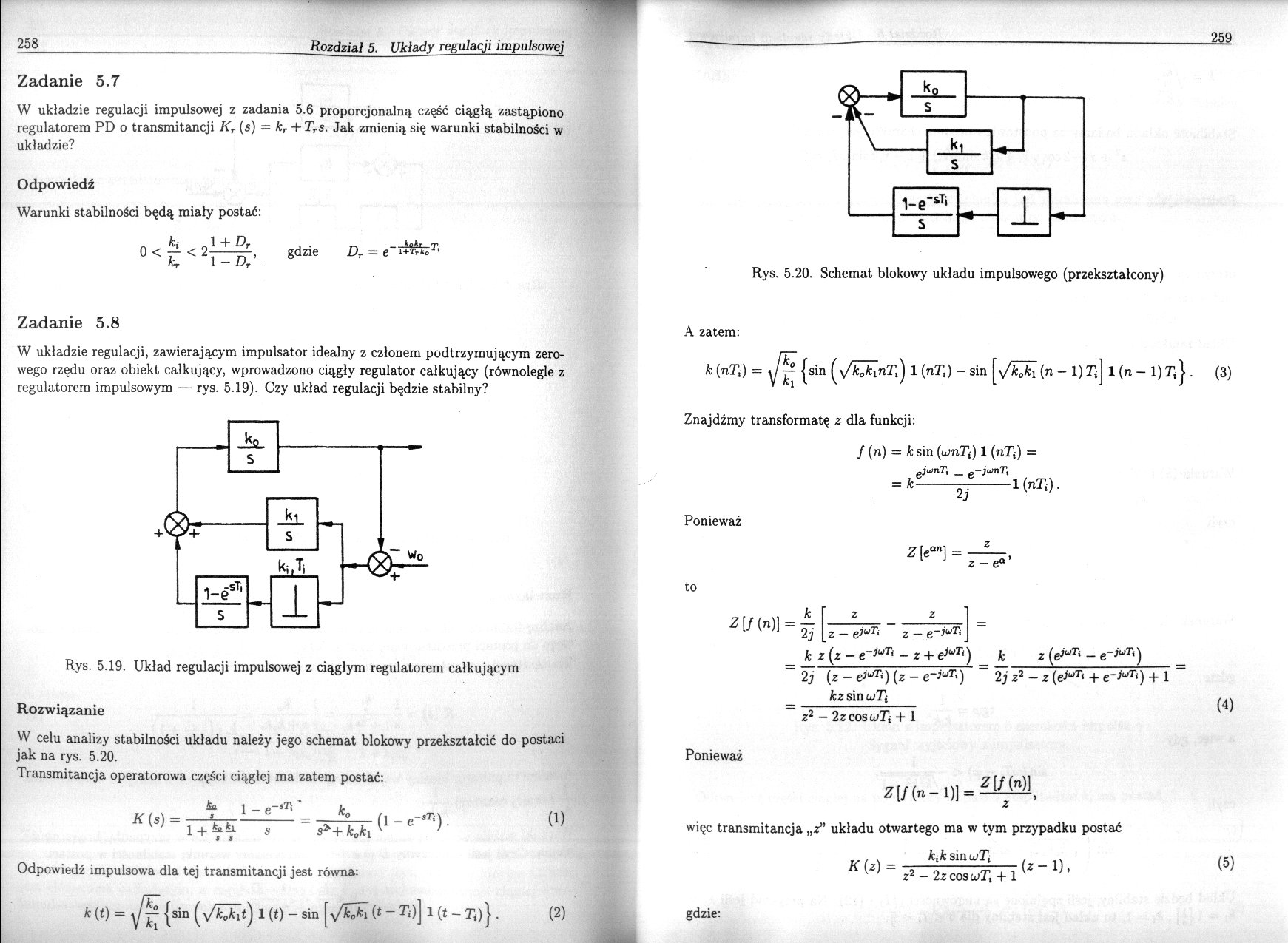
W układzie regulacji, zawierającym impulsator idealny z członem podtrzymującym zerowego rzędu oraz obiekt całkujący, wprowadzono ciągły regulator całkujący (równolegle z regulatorem impulsowym — rys. 5.19). Czy układ regulacji będzie stabilny?
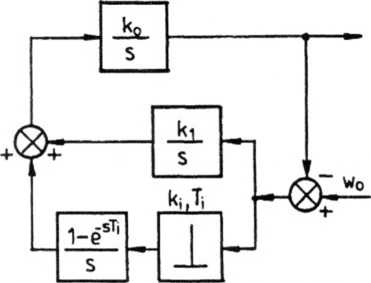
Rys. 5.19. Układ regulacji impulsowej z ciągłym regulatorem całkującym
Rozwiązanie
W celu analizy stabilności układu należy jego schemat blokowy przekształcić do postaci jak na rys. 5.20.
Transmitancja operatorowa części ciągłej ma zatem postać:
1 +
1 — e
sTi
k0
Ł fil. 3
s*+ k0ki
(1)
Odpowiedź impulsowa dla tej transmitancji jest równa:
k (t) = {sin 1 (t) - sin (ł ~ ^*)] 1 (* - 7)) j .
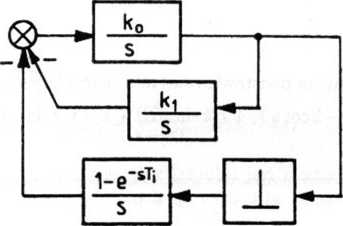
Rys. 5.20. Schemat blokowy układu impulsowego (przekształcony)
A zatem:
k (nTi) = {sin 1 (nTi) - sin (n - 1)7)] 1 (n - 1)T,|.
Znajdźmy transformatę z dla funkcji:
/ (n) = k sin (um7)) 1 (nTi) =
pjumTi _ „-jumTt
= k—Tj-W).
Ponieważ
Z [eQnl =
z — ea
to
Z - ejuTi z _ e-JuT, J
k z (z — e~iuTi - z + eJ"r’) k z (e,u'r‘ — e-,wT’)
2j (z - e}uT') (z - e~]uT') 2j z7 — z (e-'"T> + e~iuTi) + 1 kz sin uTi z1 - 2z cos oj7) + 1
więc transmitancja „z” układu otwartego ma w tym przypadku postać
kik sin uTi
K(z) =
z1 - 2z cos wT, + 1
gdzie:
Wyszukiwarka
Podobne podstrony:
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
299 (17) 298 Rozdział 5. Układy regulacji impulsowej czyli Qn+1 9n+2 L Qn t
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
243 (23) 242 Rozdział 5. Układy regulacji impulsowej Zadanie 5.1 5.2, gdy część ciągła Znaleźć
245 (21) 244 Rozdział 5. Układy regulacji impulsowej Transmitancja dyskretna ma zatem postać: K{z) =
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
249 (21) 248 Rozdział 5. Układy regulacji impulsowej Zadanie 5.2 Zbadać stabilność układu regulacji
więcej podobnych podstron