293 (18)
292 Rozdział 5. Układy regulacji impulsowej
— dla równania (5)
z — 1 + —Tikikj— = 0. 4 z
Warunek stabilności dla równania (6) ma postać:
1 — -Tjfcjfci 4
czyli
0 < Tikih < 8.
W równaniach (7) i (8) korzystamy z podstawienia z = \ następnie warunków
Hurwitza, otrzymując dla równania (7):
0 < kiki <
T
(T2 - \T) (|T - T)
oraz
kik2
a dla (8)
0 < Tkiki < 4.
Uwaga: Dla każdego z trzech przypadków można określić transmitancję dyskretną układu otwartego, a mianowicie:
Ki (z) =
4(x-l)
K3(z) = ^
l)*'
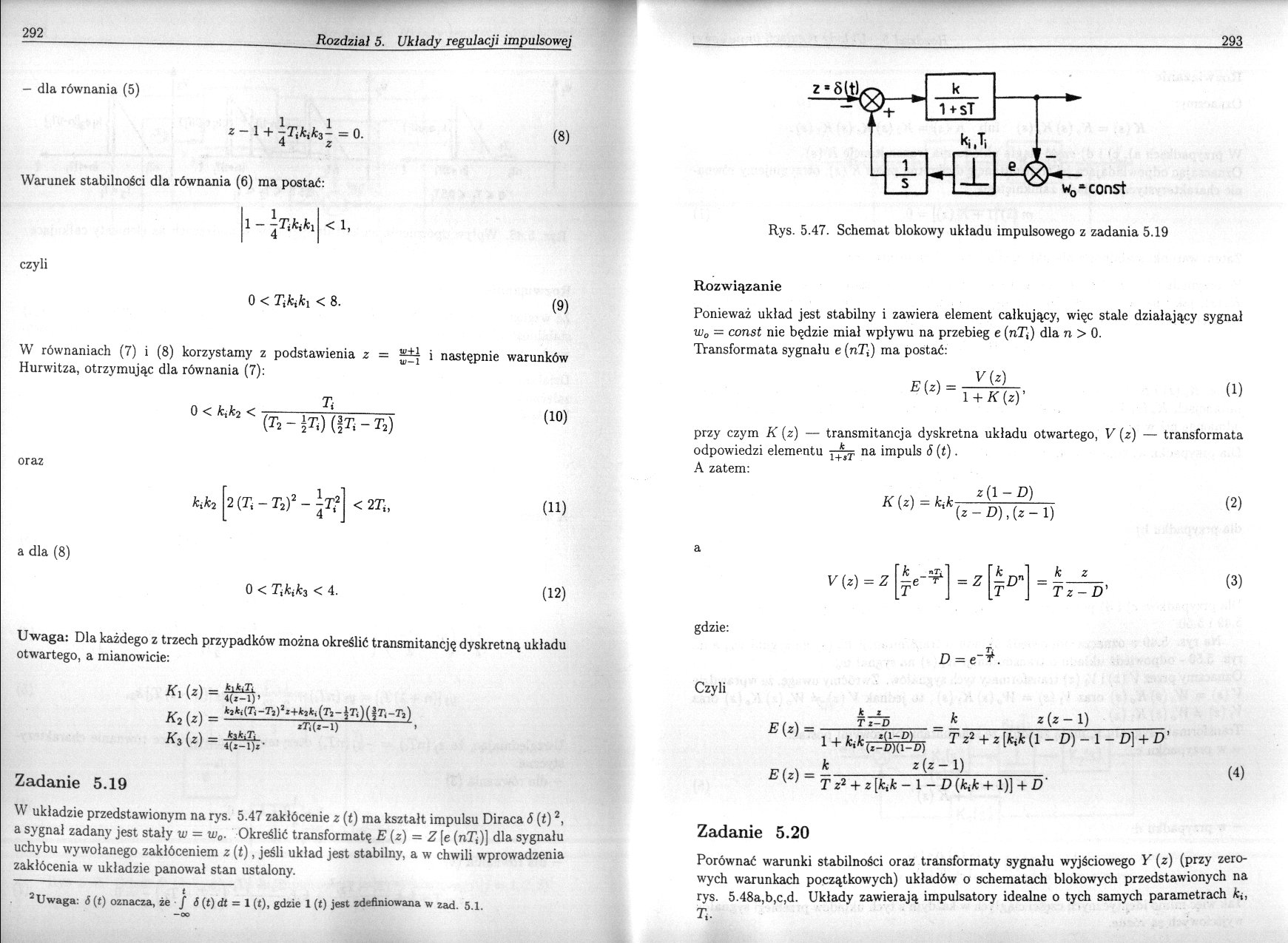
Zadanie 5.19
W układzie przedstawionym na rys. 5.47 zakłócenie z (t) ma kształt impulsu Diraca 6 (t)2, a sygnał zadany jest stały w = w0. Określić transformatę E (z) = Z [e (nT))] dla sygnału uchybu wywołanego zakłóceniem z (t), jeśli układ jest stabilny, a w chwili wprowadzenia zakłócenia w układzie panował stan ustalony.
t
2Uwaga: S (f) oznacza, że J S (t) dt = 1 (t), gdzie 1 (t) jest zdefiniowana w zad. 5.1.
|
k | |||
|
1 + sT | |||
|
K Ji | |||
|
wo | |||
Rys. 5.47. Schemat blokowy układu impulsowego z zadania 5.19
Rozwiązanie
Ponieważ układ jest stabilny i zawiera element całkujący, więc stale działający sygnał w0 = const nie będzie miał wpływu na przebieg e (nTj) dla n > 0.
Transformata sygnału e (nTj) ma postać:
<l>
przy czym K (z) — transmitancja dyskretna układu otwartego, V (z) — transformata odpowiedzi elementu na impuls <5 (t).
A zatem:
K (z) = kik
z(l~D)
(z-D),(z- 1)
V(z) = Z
|
k "i. —e ^ |
= Z |
[£d"| |
|
T |
[t |
Tz-D'
gdzie:
D = e~+.
Czyli
E(z) =
jfc Z
Tz-D
(4)
z (z - 1)
T z2 + z [fcifc — 1 — D (kik + !)] + £>
Zadanie 5.20
Porównać warunki stabilności oraz transformaty sygnału wyjściowego Y (z) (przy zerowych warunkach początkowych) układów o schematach blokowych przedstawionych na rys. 5.48a,b,c,d. Układy zawierają impulsatory idealne o tych samych parametrach ki, Ti-
Wyszukiwarka
Podobne podstrony:
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
265 (18) 264 Rozdział 5. Układy regulacji impulsowej Rys. 5.25. Przebieg x (t) i v (t) dla n < t
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
247 (24) 246 Rozdział 5. Układy regulacji impulsowej A zatem dla z > D otrzymujemy: kjk0 D T z-D
255 (20) 254 Rozdział 5. Układy regulacji impulsowej A zatem dla D > - 2-L obowiązuje warunek , a
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
279 (19) 278 Rozdział 5. Układy regulacji impulsowej 278 ki(Ti Rys. 5.35. Schemat zastępczy układu
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
299 (17) 298 Rozdział 5. Układy regulacji impulsowej czyli Qn+1 9n+2 L Qn t
243 (23) 242 Rozdział 5. Układy regulacji impulsowej Zadanie 5.1 5.2, gdy część ciągła Znaleźć
więcej podobnych podstron