365606120
Minos

Komponenty mechatroniczne - Podręcznik
1.5 Rozpoznawanie kierunku ruchu
Współpracująca para czujników indukcyjnych może posłużyć do detekcji kierunku ruchu obrotowego lub liniowego. W przypadku ruchu obrotowego, elementem wymuszającym przełączenie stanu wyjścia czujnika może być np. koło zębate (rys. 1.13).
Sygnały z czujników indukcyjnych podawane są na układ dyskrymina-tora fazy (układu wyznaczającego przesunięcie fazowe pomiędzy przebiegiem 1 i 2). W przypadku ruchu w lewo sygnał 1 poprzedza sygnał 2 na osi czasu i wówczas ustawiane jest wyjście L. Wyjście to sygnalizuje ruch w lewo. Przy ruchu w prawo występuje sytuacja odwrotna tj. sygnał 2 poprzedza sygnał 1 i wówczas w dyskryminatorze ustawiane jest wyjście R, co oznacza ruch w prawo.
Podobnie realizowane jest wyznaczenie kierunku ruchu liniowego z pomocą pierścieniowego czujnika bistabilnego. Czujnik ten zawiera dwie cewki umieszczone obok siebie, zasilane z dwóch niezależnych generatorów. Konstrukcja czujnika zapewnia zróżnicowanie prądów płynących przez cewkę pierwszą i drugą.
W danym momencie czasowym może pracować tylko jeden z generatorów. Jeżeli przedmiot zbliża się z lewej strony ku prawej to najpierw tłumieniu ulegnie obwód cewki pierwszej, a następnie drugiej. W przypadku ruchu w kierunku odwrotnym, sytuacja ulega odwróceniu. Analizując wartości prądów płynących przez cewki układ pomiarowy rozróżnia kierunek ruchu obiektu.
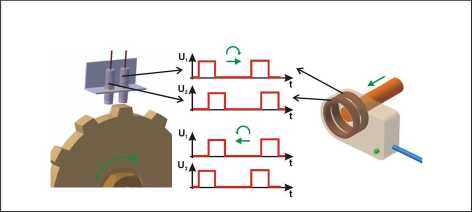
Rys. 1.13: Rozpoznawanie kierunku ruchu dwoma czujnikami standardowymi i czujnikiem
bistabilnym
19
Wyszukiwarka
Podobne podstrony:
Minos Komponenty mechatroniczne - Podręcznik Spis treści: 1 Czujniki
Minos Komponenty mechatroniczne - Podręcznik Strumień pola magnetycznego wytwarzanego przez cewkę
Minos Komponenty mechatroniczne - Podręcznik 1.3.2 Współczynniki korekcyjne Przedmiot wykrywany
Minos 1.3.3 Komponenty mechatroniczne - Podręcznik Sposób zabudowy Spełnienie zaleceń montażowych
Minos 1.4 Komponenty mechatroniczne - PodręcznikCzujniki specjalne1.4.1 Czujniki indukcyjne
Minos Komponenty mechatroniczne - Podręcznik 1.4.2 Czujniki pracujące w silnym polu
Minos 1.4.3 Komponenty mechatroniczne - Podręcznik Czujniki pracujące w trudnych warunkach Stosowani
Minos 1.6 Komponenty mechatroniczne - Podręcznik Czujniki NAMUR Czujniki indukcyjne NAMUR są
Minos Komponenty mechatroniczne - Podręcznik 1.7 Analogowe czujniki indukcyjne Inaczej niż w
Minos Komponenty mechatroniczne - Podręcznik 40 2.7 Aplikacje. 3 Czujniki
Minos 1.8 Komponenty mechatroniczne - Podręcznik Zasilanie prądem stałym Czujniki zasilane prądem
Minos Komponenty mechatroniczne - Podręcznik 4.3.3 Czujniki
Minos 1 Komponenty mechatroniczne - PodręcznikCzujniki indukcyjne 1.1 Informacje podstawowe Czujniki
Minos Komponenty mechatroniczne - Podręcznik 1.2 Podstawy teoretyczne 1.2.1
w IW Minos Komponenty mechatroniczne - Podręcznik W rzeczywistych obwodach LC występują zawsze dodat
Minos Komponenty mechatroniczne - Podręcznik 1.2.2 Układ elektroniczny W generatorach zawierających
Komponenty mechatroniczne - Podręcznik V Minos 1.3 Konstrukcja podstawowa 1.3.1
Komponenty mechatroniczne - Podręcznik Minos lub go nie ma; rzadziej analogowy - odwrotnie proporcjo
Komponenty mechatroniczne - Podręcznik W opisie technicznym każdego czujnika podawana jest maksymaln
więcej podobnych podstron