365606128
w
IW Minos
Komponenty mechatroniczne - Podręcznik
W rzeczywistych obwodach LC występują zawsze dodatkowe straty energii, związane z własną rezystancją cewki i kondensatora. Z powodu tych strat oscylacje obwodu z rezystancją RLC będą tłumione (zanikające) (rys. 1.3). Oscylacje obwodu można podtrzymać, zasilając go z zewnętrznego źródła napięciem sinusoidalnym. Maksymalna amplituda oscylacji wystąpi, gdy częstotliwość źródła podtrzymującego będzie równa częstotliwości własnej nietłumionego obwodu LC.
[Hz],
f 2tt4lC
gdzie:
f-częstotliwość zewnętrznego źródła sinusoidalnego, f0- częstotliwość własna nietłumionego obwodu LC,
L - indukcyjność [Henr],
C - pojemność [Farad],
Jest to warunkiem wystąpienia rezonansu napięć lub prądów w obwodzie. Maksimum amplitudy oscylacji w obwodzie jest tym wyższe im większa jest wartość współczynnika dobroci obwodu.
Współczynnik dobroci Q jest miarą strat powstających w elementach L i C, reprezentowanych przez rezystancję równoległą R. Bezstratny obwód miałby w warunkach rezonansu, nieskończenie dużą rezystancję równoległą R. Im większe są straty w obwodzie tym rezystancja równoległa jest mniejsza, a tym samym współczynnik dobroci też jest
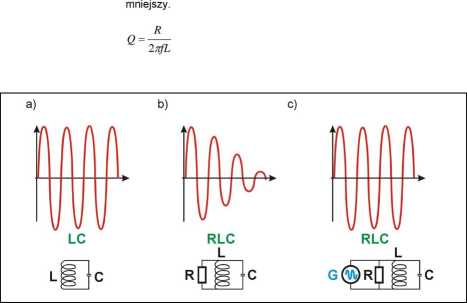
Rys. 1.3:
Oscylacje obwodów LC i RLC: a) obwód LC nietłumiony, bjobwód RLC bez źródła zewnętrznego, c) obwód RLC zasilany sinusoidalnym źródłem zewnętrznym
Wyszukiwarka
Podobne podstrony:
Minos Komponenty mechatroniczne - Podręcznik Spis treści: 1 Czujniki
Minos Komponenty mechatroniczne - Podręcznik Strumień pola magnetycznego wytwarzanego przez cewkę
Minos Komponenty mechatroniczne - Podręcznik 1.3.2 Współczynniki korekcyjne Przedmiot wykrywany
Minos 1.3.3 Komponenty mechatroniczne - Podręcznik Sposób zabudowy Spełnienie zaleceń montażowych
Minos 1.4 Komponenty mechatroniczne - PodręcznikCzujniki specjalne1.4.1 Czujniki indukcyjne
Minos Komponenty mechatroniczne - Podręcznik 1.4.2 Czujniki pracujące w silnym polu
Minos 1.4.3 Komponenty mechatroniczne - Podręcznik Czujniki pracujące w trudnych warunkach Stosowani
Minos Komponenty mechatroniczne - Podręcznik 1.5 Rozpoznawanie kierunku ruchu Współpracująca para
Minos 1.6 Komponenty mechatroniczne - Podręcznik Czujniki NAMUR Czujniki indukcyjne NAMUR są
Minos Komponenty mechatroniczne - Podręcznik 1.7 Analogowe czujniki indukcyjne Inaczej niż w
Minos Komponenty mechatroniczne - Podręcznik 40 2.7 Aplikacje. 3 Czujniki
Minos 1.8 Komponenty mechatroniczne - Podręcznik Zasilanie prądem stałym Czujniki zasilane prądem
Minos Komponenty mechatroniczne - Podręcznik 4.3.3 Czujniki
Minos 1 Komponenty mechatroniczne - PodręcznikCzujniki indukcyjne 1.1 Informacje podstawowe Czujniki
Minos Komponenty mechatroniczne - Podręcznik 1.2 Podstawy teoretyczne 1.2.1
Minos Komponenty mechatroniczne - Podręcznik 1.2.2 Układ elektroniczny W generatorach zawierających
Komponenty mechatroniczne - Podręcznik V Minos 1.3 Konstrukcja podstawowa 1.3.1
Komponenty mechatroniczne - Podręcznik Minos lub go nie ma; rzadziej analogowy - odwrotnie proporcjo
Komponenty mechatroniczne - Podręcznik W opisie technicznym każdego czujnika podawana jest maksymaln
więcej podobnych podstron