5217957375
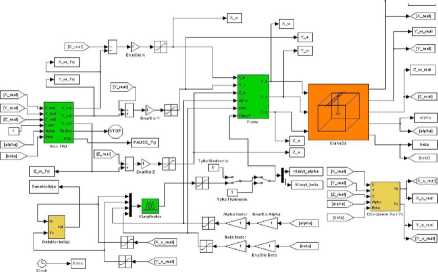
Rys. 9.2. Układ sterowania suwnicą SUW - system szybkiego prototypowania MATLAB/Simulink/RT-CON
Położenie ładunku Xc, yc w kartezjańskim układzie odniesienia dane jest zależnościami
(9.1)
xc = xw + Rsin(a)cos(/?) n n n n n
--<a< —, ---</?< — ,
yc = yw + Rsin(/?) 2 2 2 2
gdzie xw i yw opisują płożenie wózka, R określa długość linki (przy założeniu stałego jej naprężenia), zaś a i ff to kąty wychylenia transportowanej masy.
System sterowania, przedstawiony na rys. 9.2, działa w pakiecie MATLAB/ Simulink/RT-CON i umożliwia sterowanie w czasie rzeczywistym laboratoryjnym modelem trójwymiarowej suwnicy SUW.
Regulator rozmyty
Do sterowania wózkiem (ruch w osi x) oraz mostem (ruch w osi y) zastosowano dwa niezależne trójwejściowe regulatory rozmyte typu Takagi-Sugeno (t-norma to iloczyn, wyjście opisuje zależność 6.2). Sygnały wejściowe tych układów to błąd (E) położenia wózka/mostu w stosunku do zadanej trajektorii (dla wózka w osi x, dla mostu w osi y), wartość odpowiedniego kąta (K) wychylenia ładunku (a dla wózka i fi dla mostu) oraz stopień tłumienia (KT) uzyskiwany z klasyfikatora przestrzeni. Zbiory rozmyte określone dla wejść, przedstawiono na rys. 9.3. Sygnałem wyjściowym regulatorów jest sterowanie (U) wózka/mostu, które w następnikach reguł przyjmuje wartości: N (-1), Z (0), P (1). Każdy z układów rozmytych posiada 6 reguł, przedstawionych poniżej, z których 3 pierwsze są odpowiedzialne za śledzenie trajektorii a 3 ostatnie za tłumienie odpowiedniego kąta wychylenia (a dla wózka, (i dla mostu). W osi Z (podnoszenie - opuszczanie ładunku) zastosowano regulator PID (Żabiński 2003).
* Tutaj a i f) są bezpośrednio mierzone w systemie i różnią się od kątów wykorzystywanych w modelu matematycznym, opisanym w rozdziale 2.4.
92
Tomasz Żabiński, tomz@prz-rzeszow.pl, 2006-03-14
Wyszukiwarka
Podobne podstrony:
66208 instalacje154 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 188 Rys. 7.8. Układ sterowania silnika skokow
Kompletna struktura sterowania napędem hybrydowym została przedstawiona na rys. 3. Rys. 3. Układ ste
Rys. 2. Układ sterowania ręcznego temperaturą pieca opalanego gazem [4, s. 8] Jednym z ważnych param
Prototypowanie algorytmów sterowania. 157 Obiekt (1) zaimplementowany został w środowisku Matlab/Sim
Rapid Prototyping Systems (RPS) Systemy szybkiego wytwarzania prototypów to grupa urządzeń i technol
Image606 4) . Układ sterowania przerwaniami — 3214 Jednostka ta zapewnia wielopoziomowy system przer
Laboratorium Przemysłowe Systemy Cyfrowe (PLC)1C-09 UKŁAD STEROWANIA POMPAMI I Opis zadania: Układ n
Widok finalnego układu sterowania zdarzeniami przedstawiono na rys. 16. Rys. 16. Układ sterowania
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
skanowanie0008 (13) Wejścia informacyjne w kodzie SCO 8£21 Rys. 3.51. Układ sterowania półprzewodnik
5 (1174) UKŁAD ZEGARA SYSTEMOWEGO MIKROKOMPLiETRA C64-B. COOTYCZY SCHEMATU 251469“ RYS.4). Układ zeg
więcej podobnych podstron