5236001158
Dane
START
I
Orientacja początkowa efektora: a, p Wymiary geometryczne manipulatora: m, k Badana wysokość H do wyznaczenia strefy Si

Rozwiązanie zadania odwrotnego kinematyki Wyznaczenie charakterystycznych punktów efektora
(algorytm rozwicpywania zgodnie z rys. 6.5)

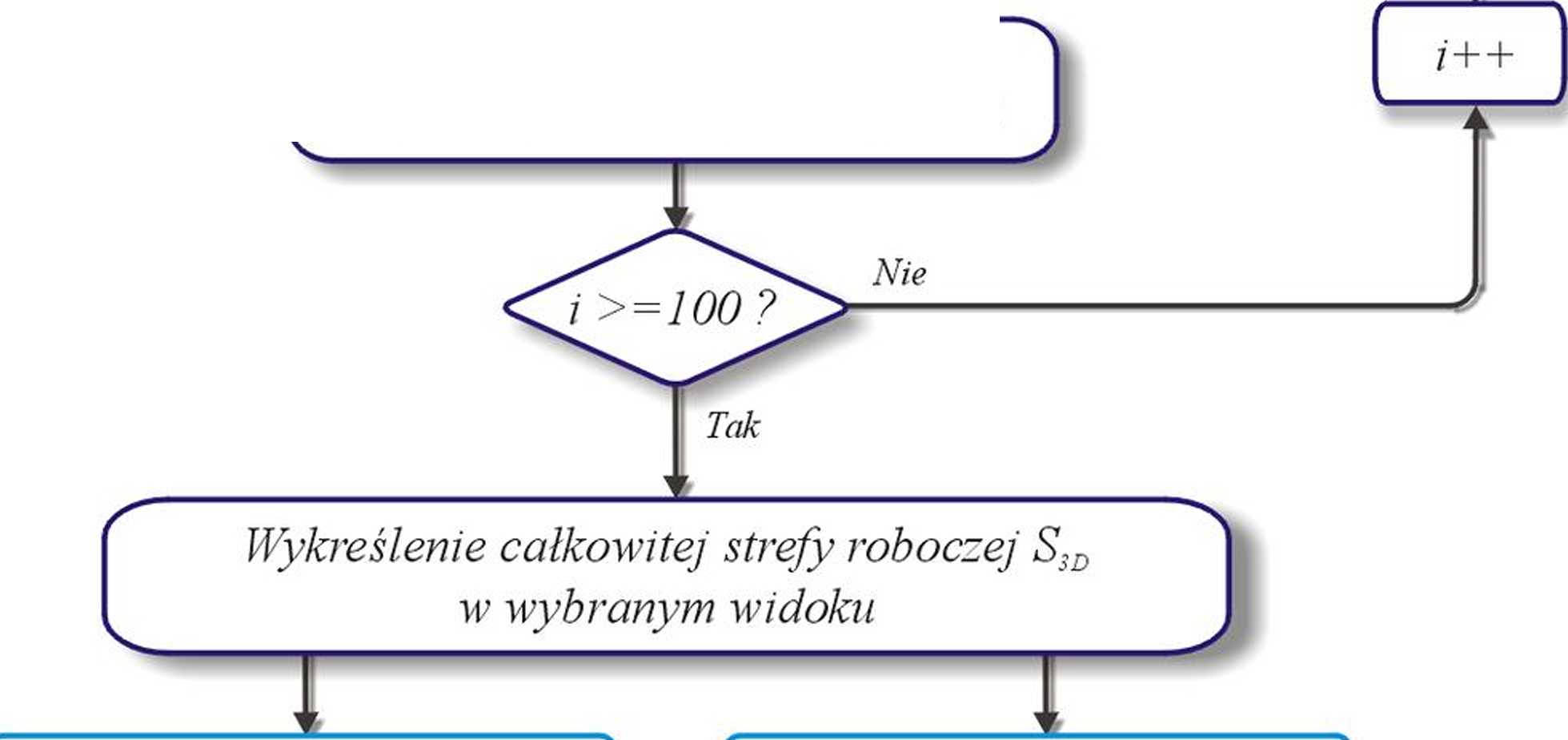
i = 0;

H, = i *0,01 * H/h
I
Wyznacz strefą SH dla H = H;
(algorytm wyznaczania zgodnie z rys. 6.11)
Widok z góry
Widok akson o m e ti ycz ny
H/nł
04°W
|
f>T J |
\ M |
|
END I |
f END |
Wyszukiwarka
Podobne podstrony:
Dane Dwa położenie efektora: xs, ys, zs, a, p, 0 Wymiary geometryczne manipulatora: m, kI Rozwiązani
Dane Dwa położenia efekt ora: xs, ys, zs, a, p, 0 Wymiary geometryczne manipulatora: m, k Traje
Triplanar - położenie - efektor trójkątnywersja 1.3 Wyznacz macierze transformacji Wymiary geometryc
3. Przebieg ćwiczenia Na początku ćwiczenia należało zmierzyć wymiary geometryczne
skanuj0029 (35) Określenie wymiarów geometrycznych: • odległość osi kół •
HPIM5183 3.2.2. Koła zębate walcowe o zębach śrubowych (skośnych)3.2.2.1. Podstawowe wymiary geometr
Triplanar - Dwa położeniawersja 1. Parametry geometryczne manipulatora Długość członu łączącego k =
120 [mm] Alfa = 0 103.923 [mm] Beta = 0 Triplanar - Strefa robocza Wymiary geometryczne
PC200021 Rys. S. 1 Zmiana wymiarów geometrycznych przewodnika poddanego działaniu nej manii elektron
69675 obl 3 (2) 6. Wyznaczenie wymiarów geometryczr-h kłów d = 25mm Dw = 35mm D, = 56mm Dk = 45,5mm
screen symulacja pierwsza —I— Start + 1 + 2 + 3 A Start Na start czas początkowy czas
Untitled 910 PROJEKT FUNDAMENTU RAMOWEGO POD TURBOZESPÓŁ 1. Wymiary geometryczne ramy i schemat obci
30 (312) Rys. 2 24. Znaki ograniczenia: a) kreski, b) początek linii wymiarowej, c) groty
więcej podobnych podstron